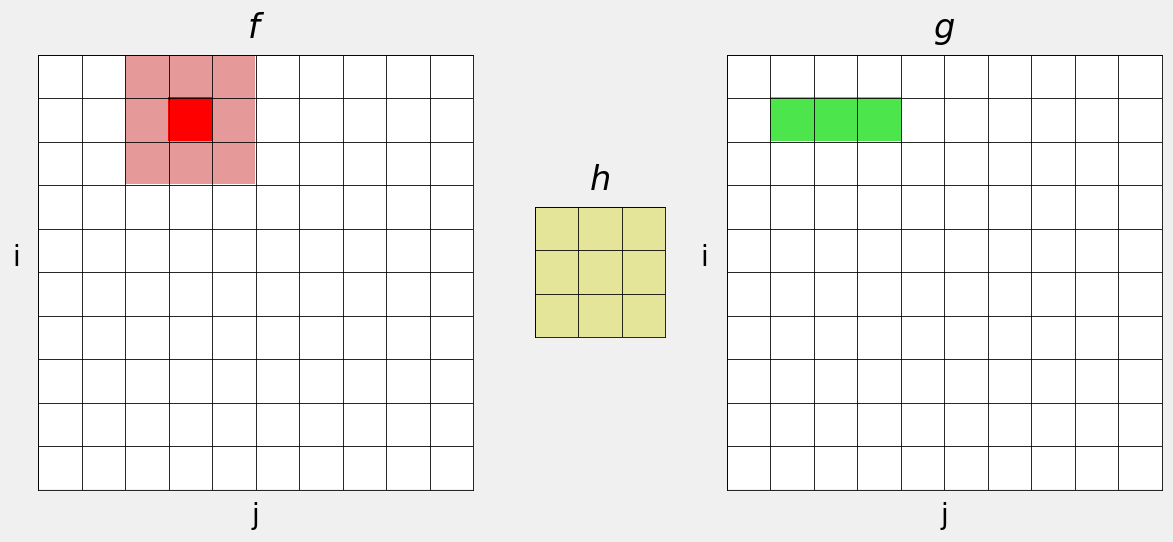
Content
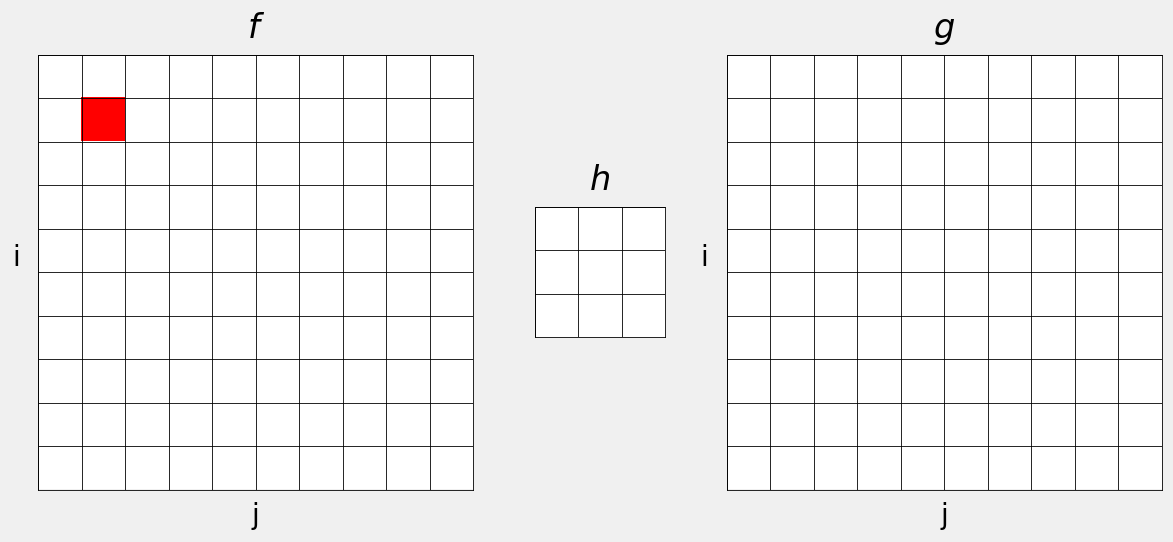
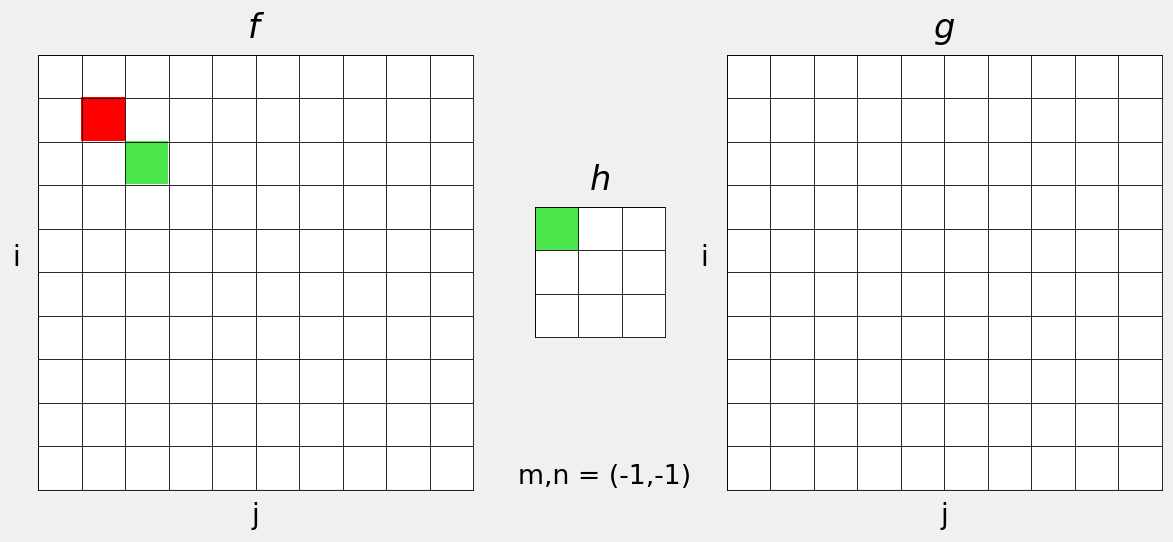
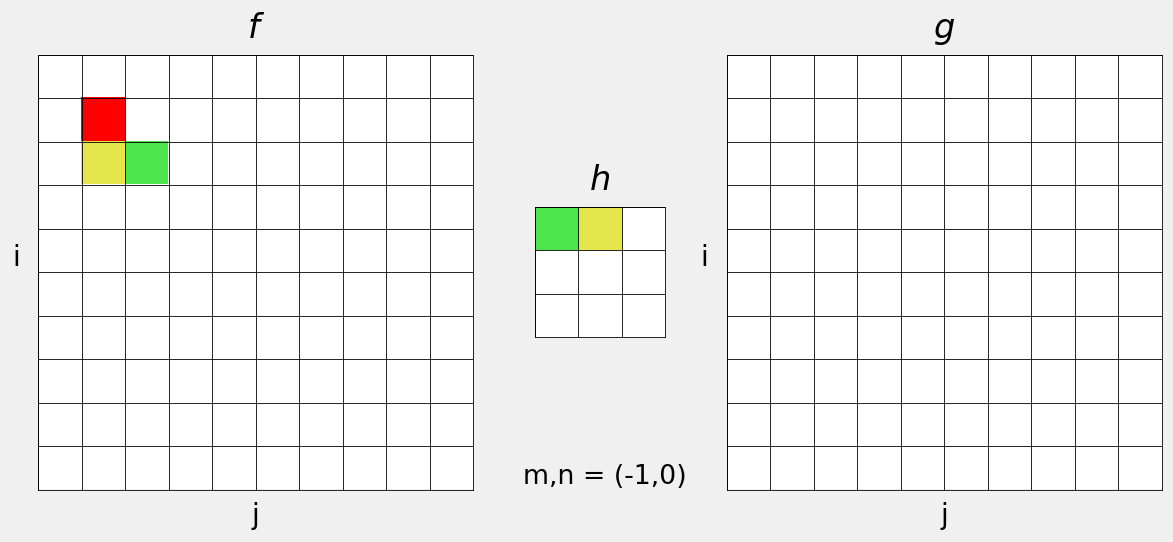
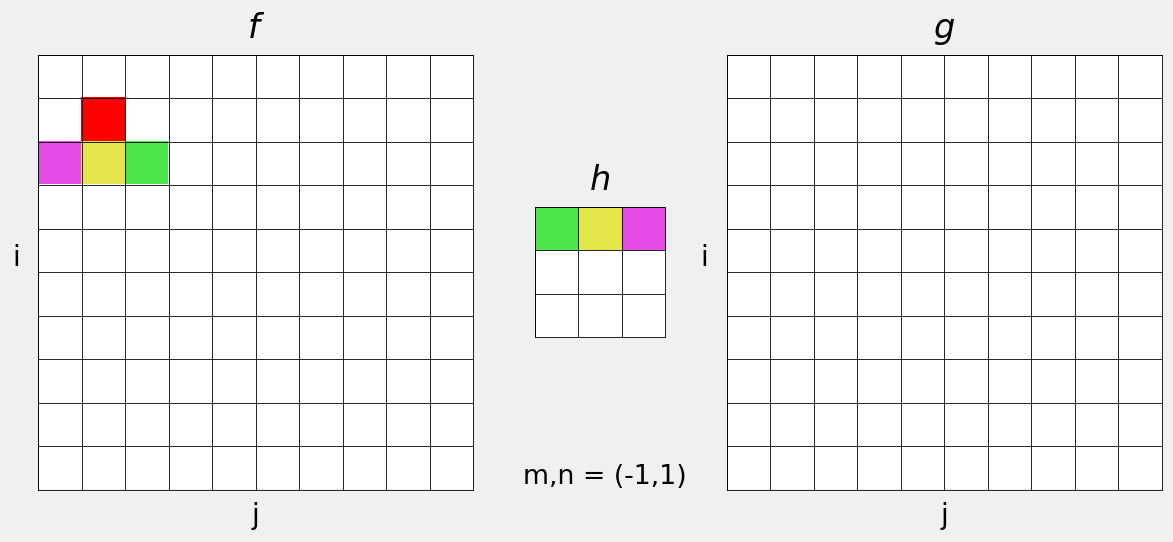
- 2D Convolutions
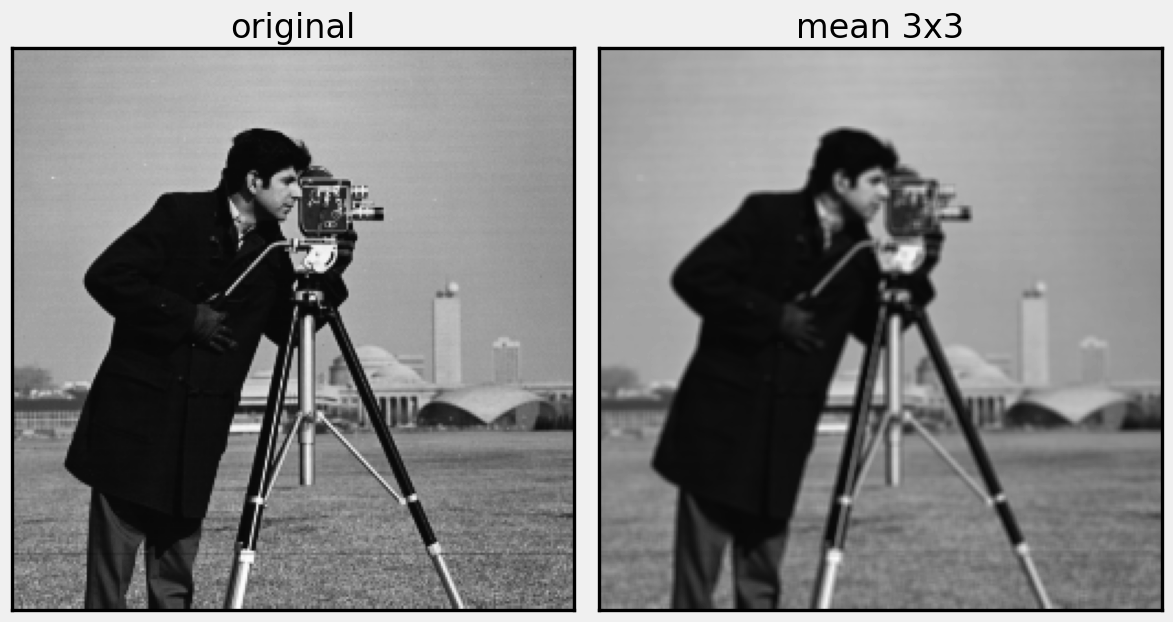
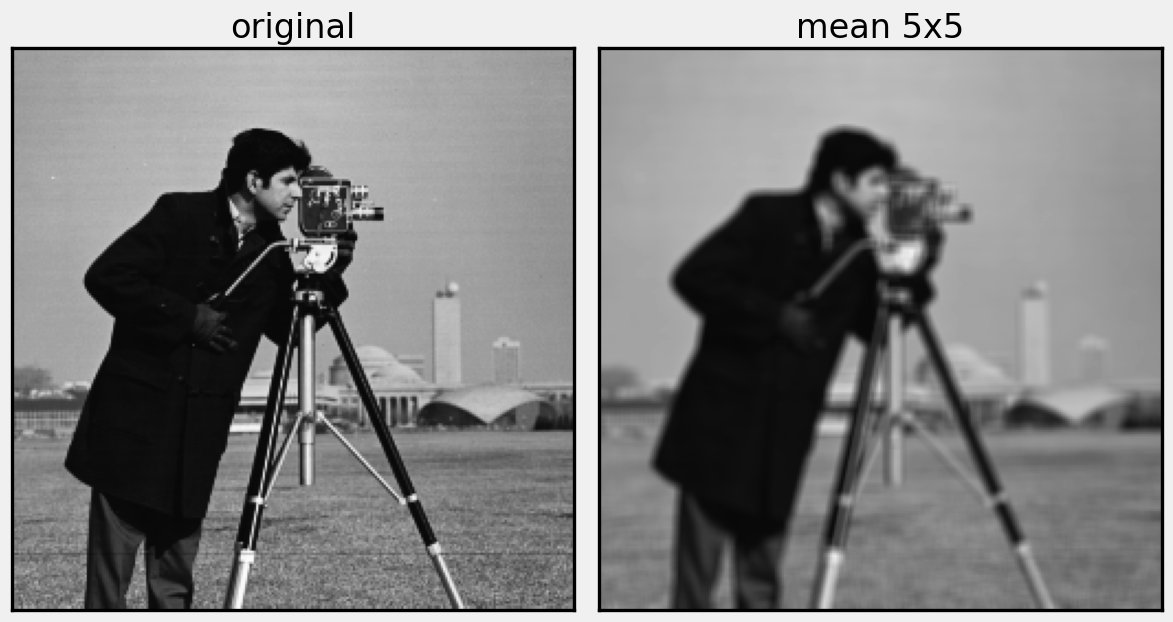
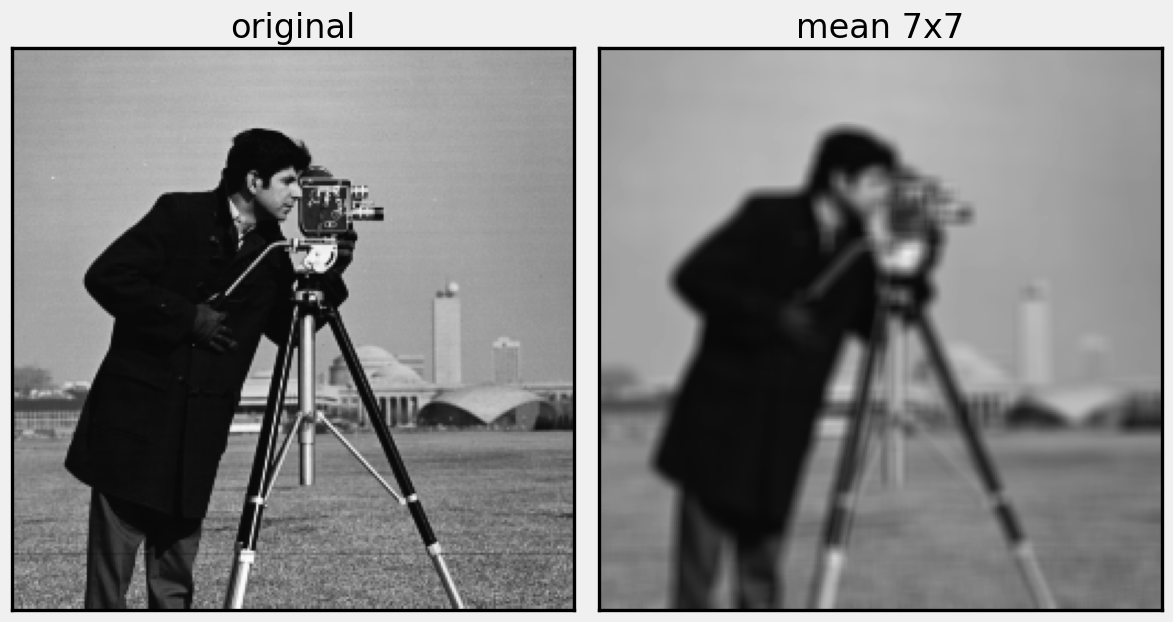
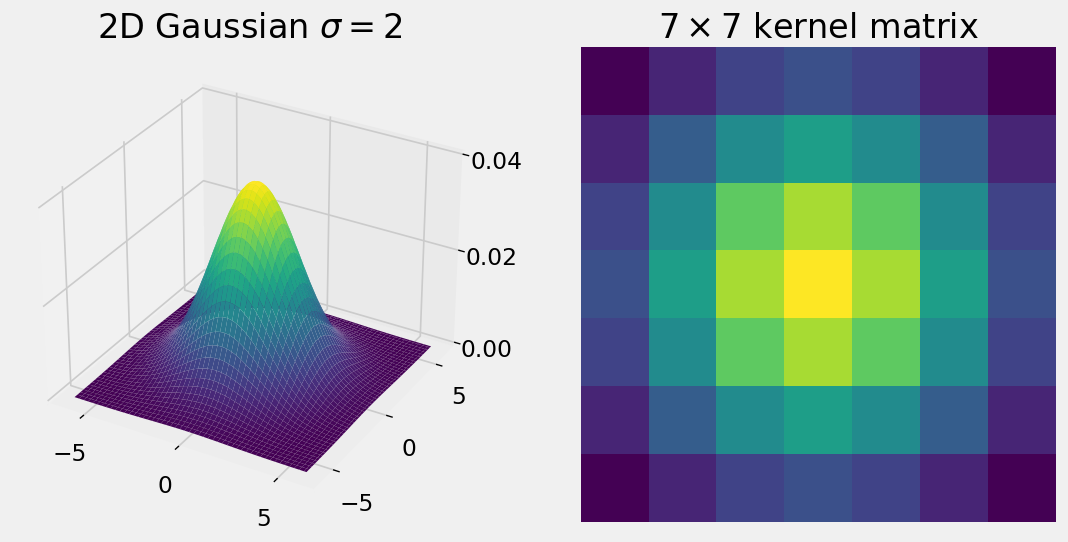
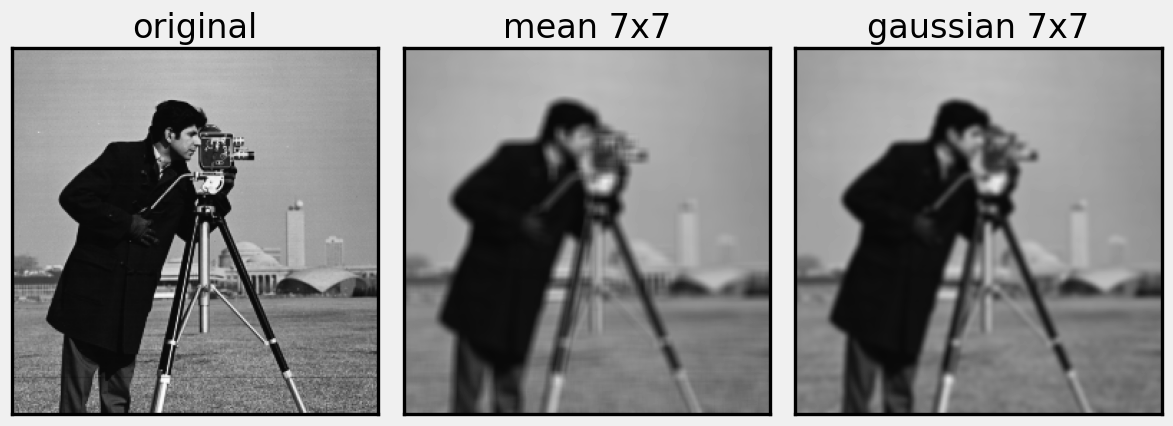
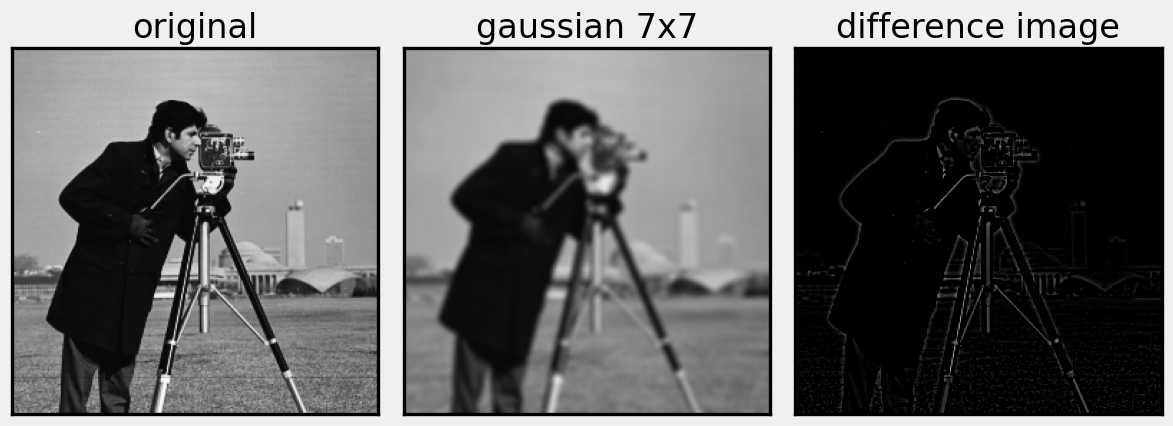
- Smoothing Filters
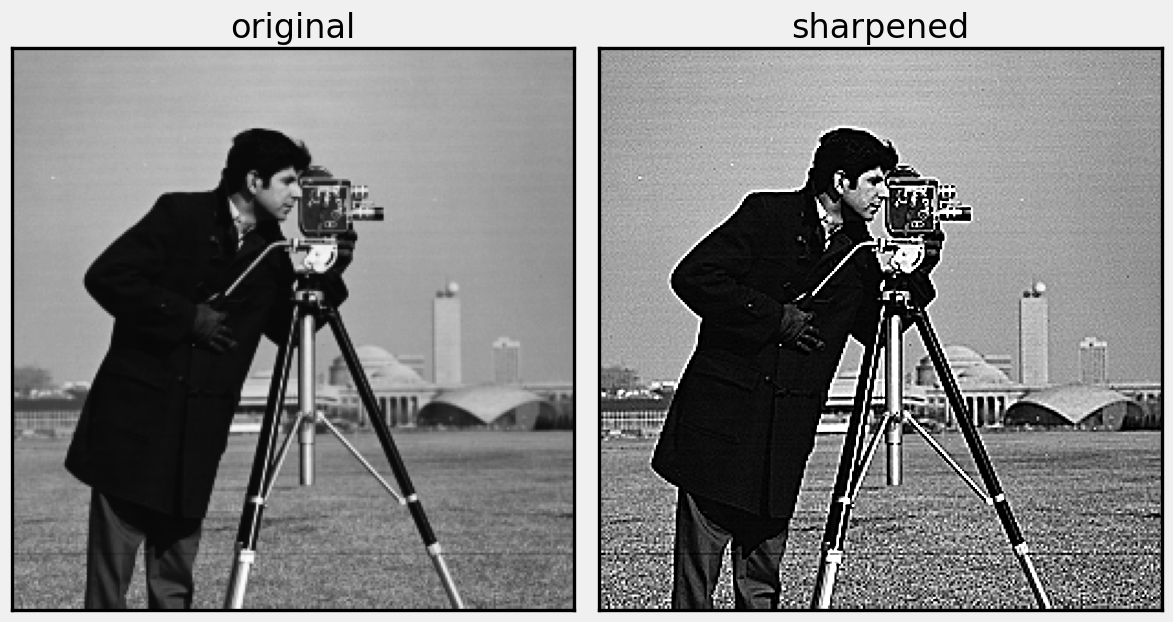
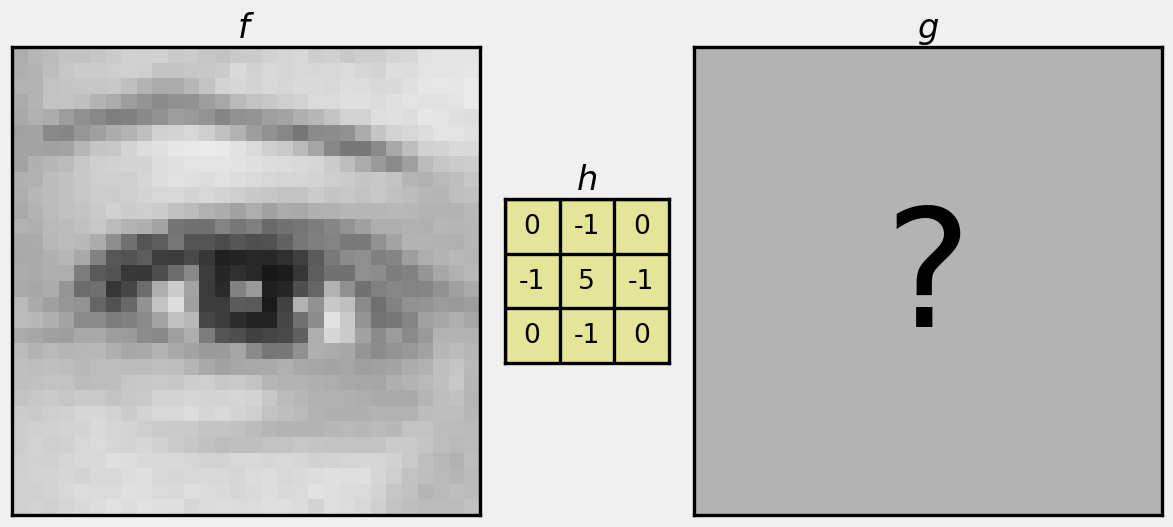
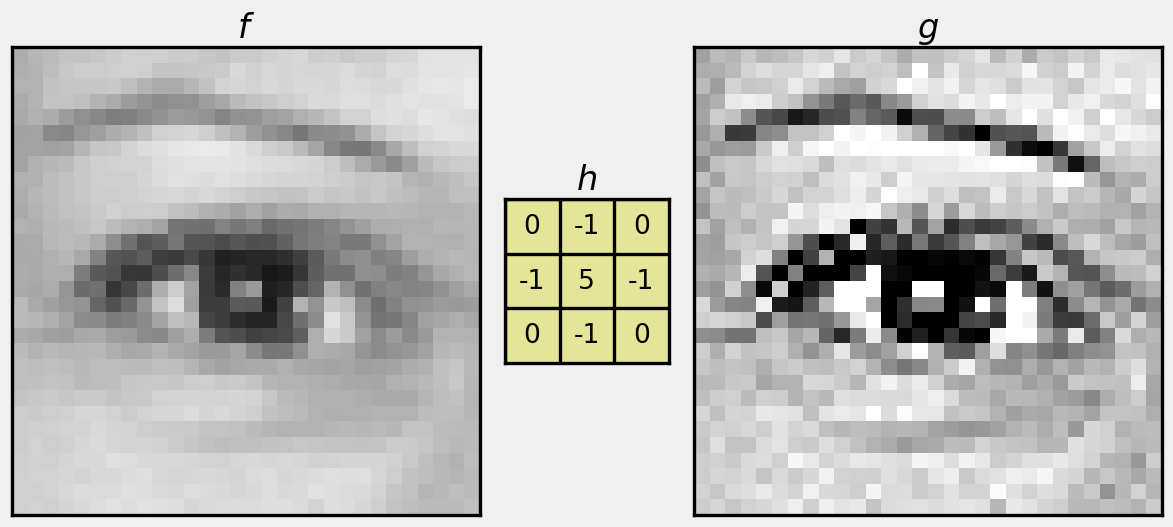
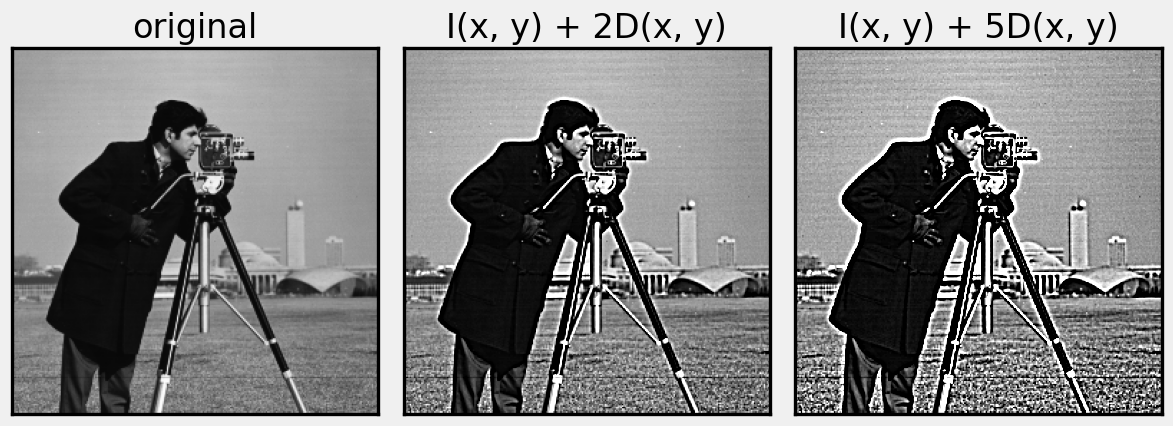
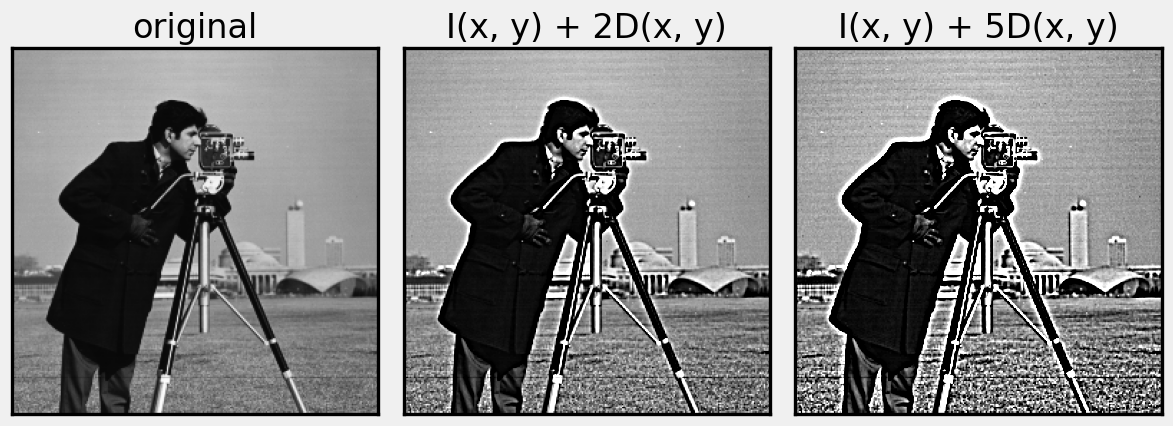
- Sharpening and Unsharp Masking
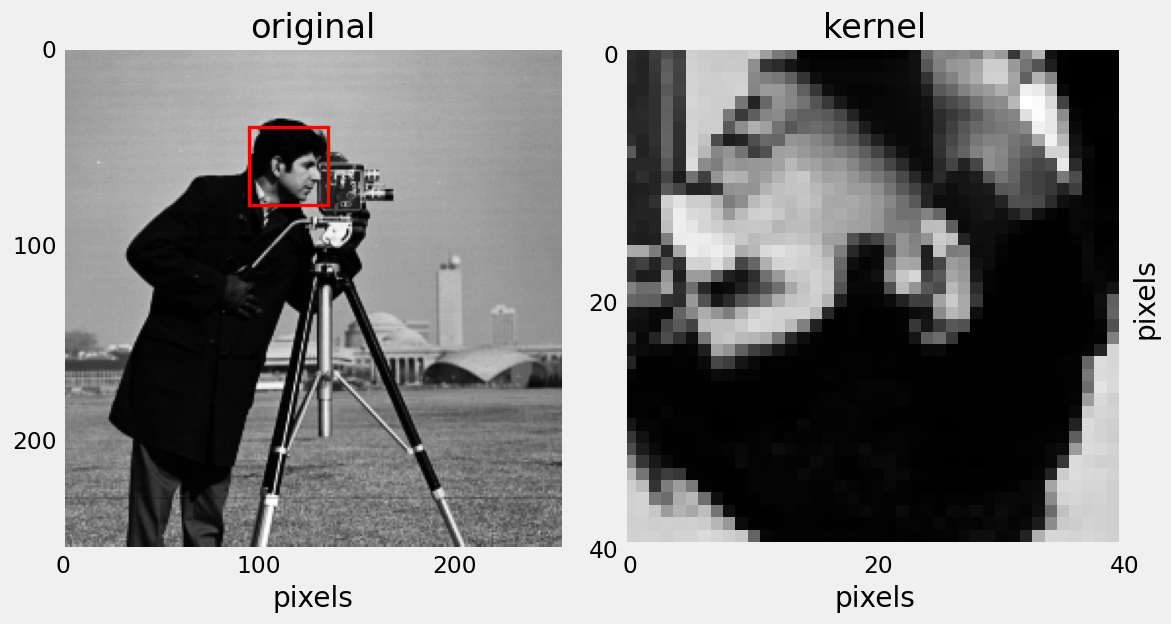
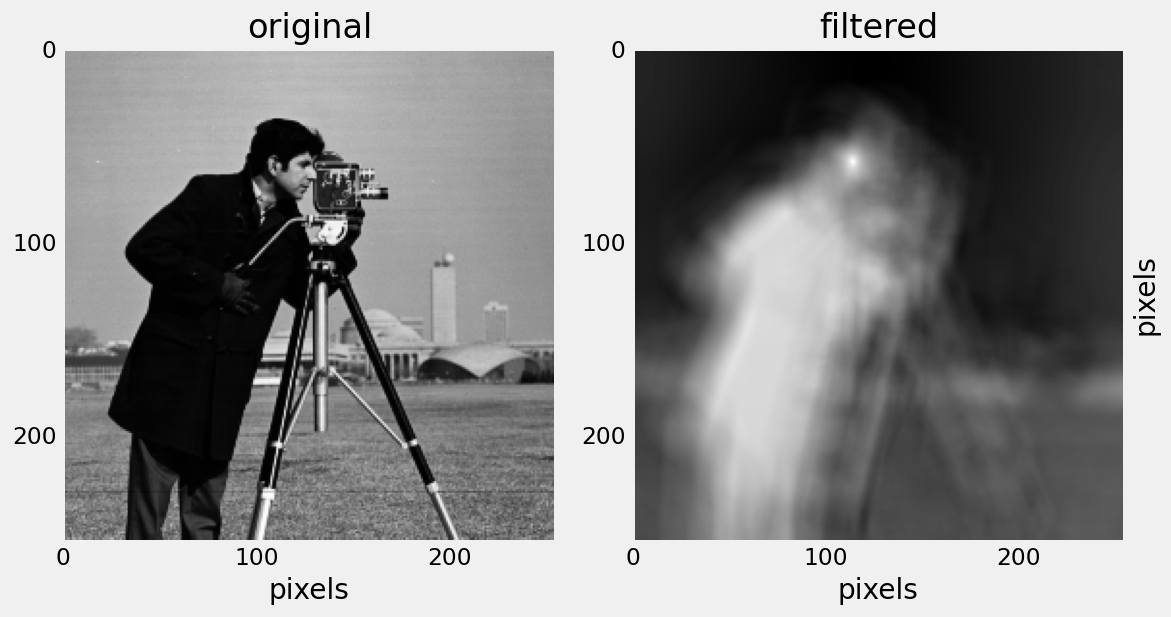
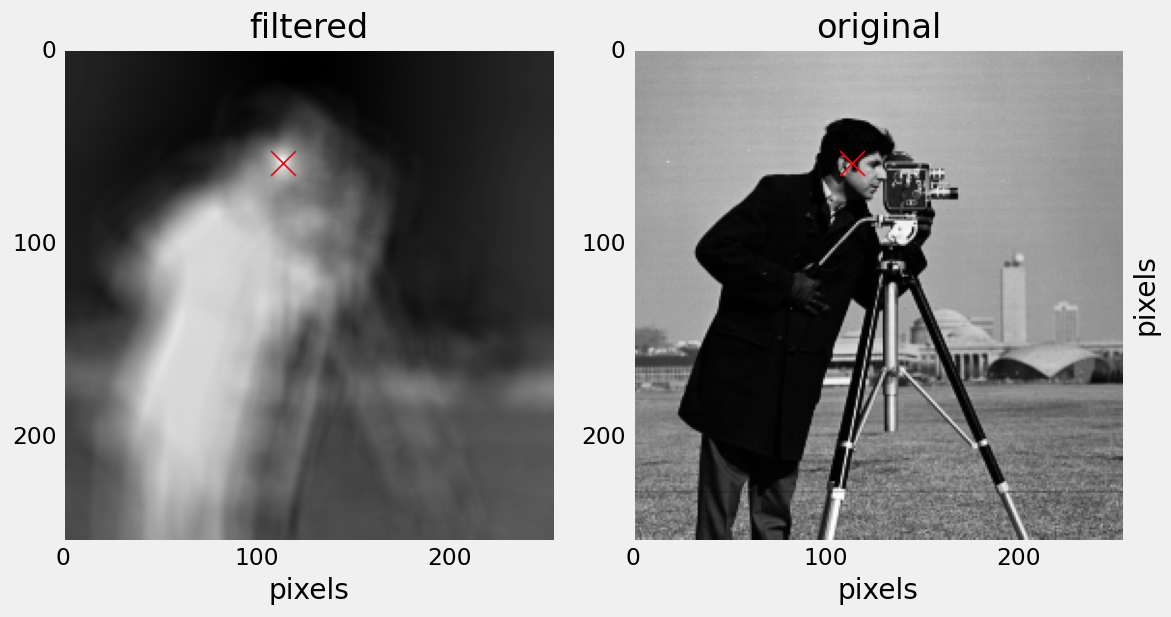
- Template Matching
Audiovisual Processing CMP-6026A
Used for smoothing and sharpening…
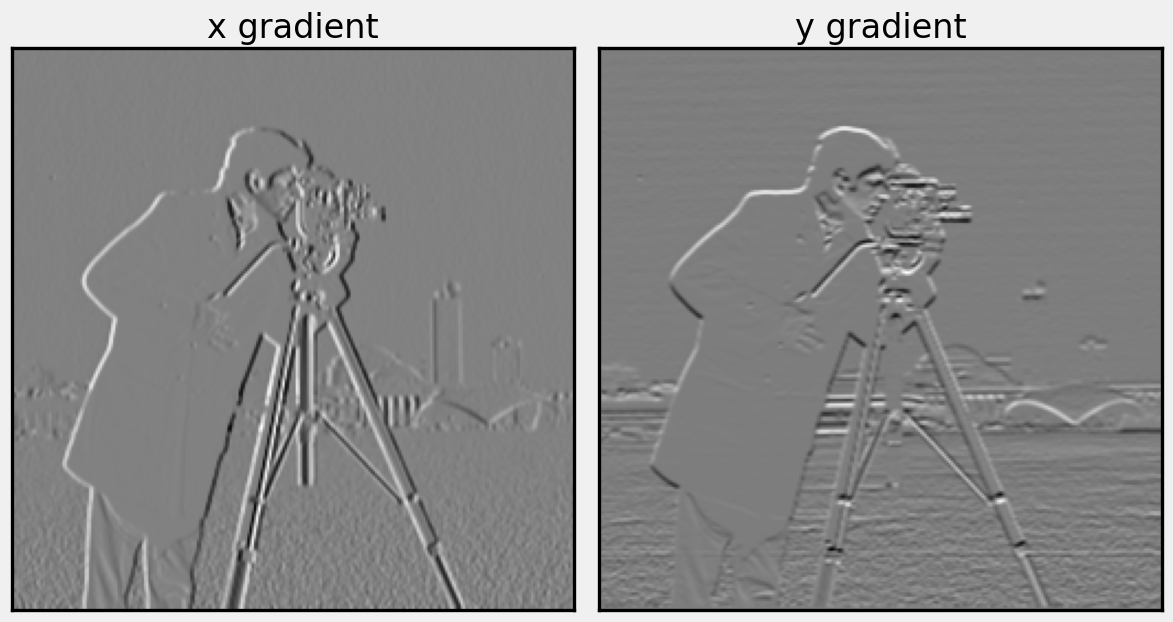
Estimating gradients…
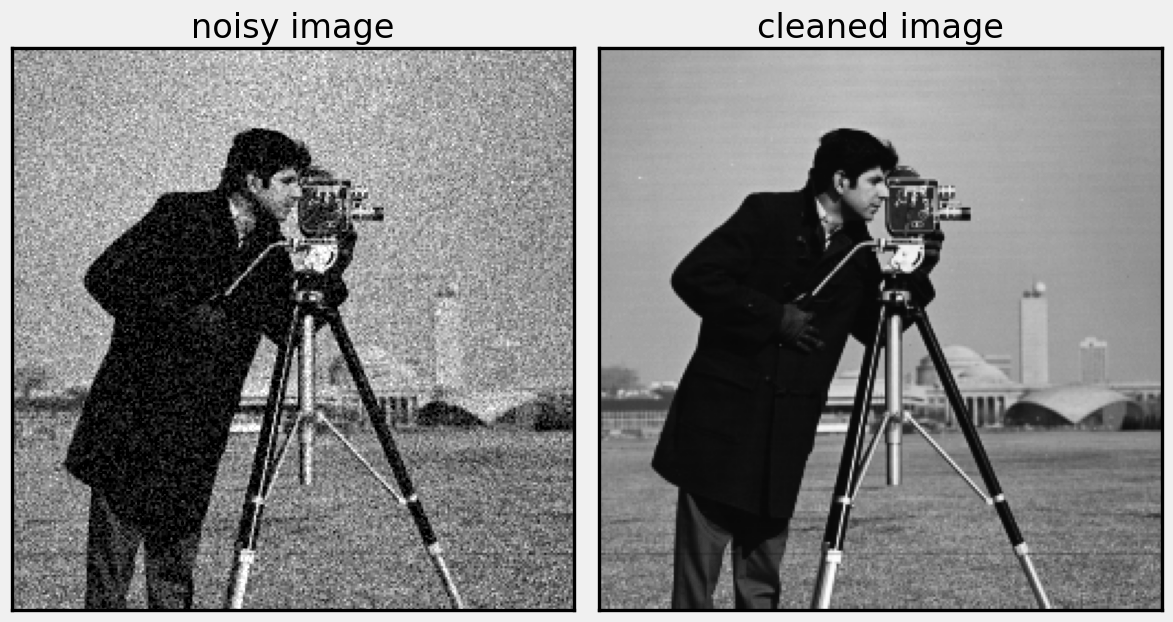
Removing noise…
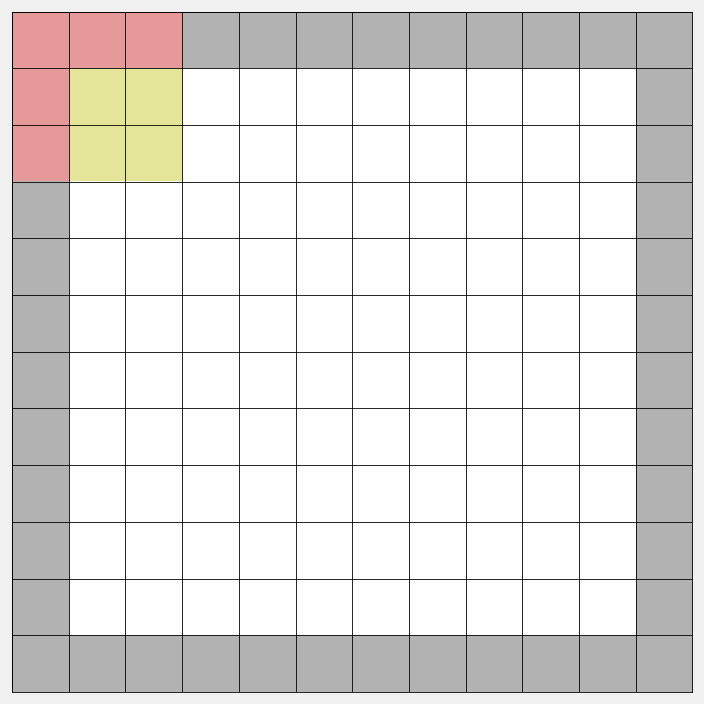
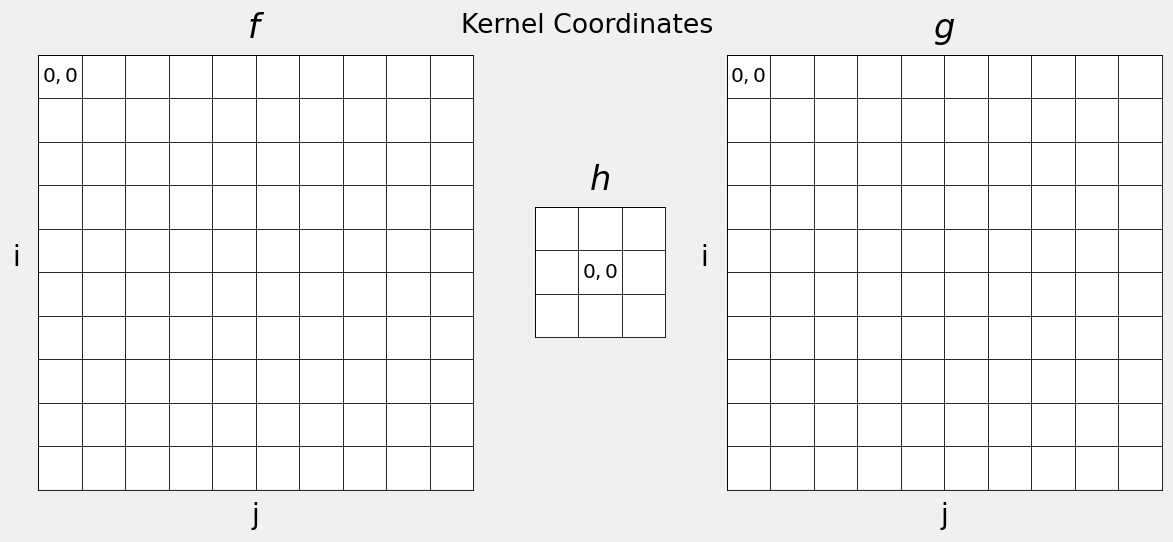
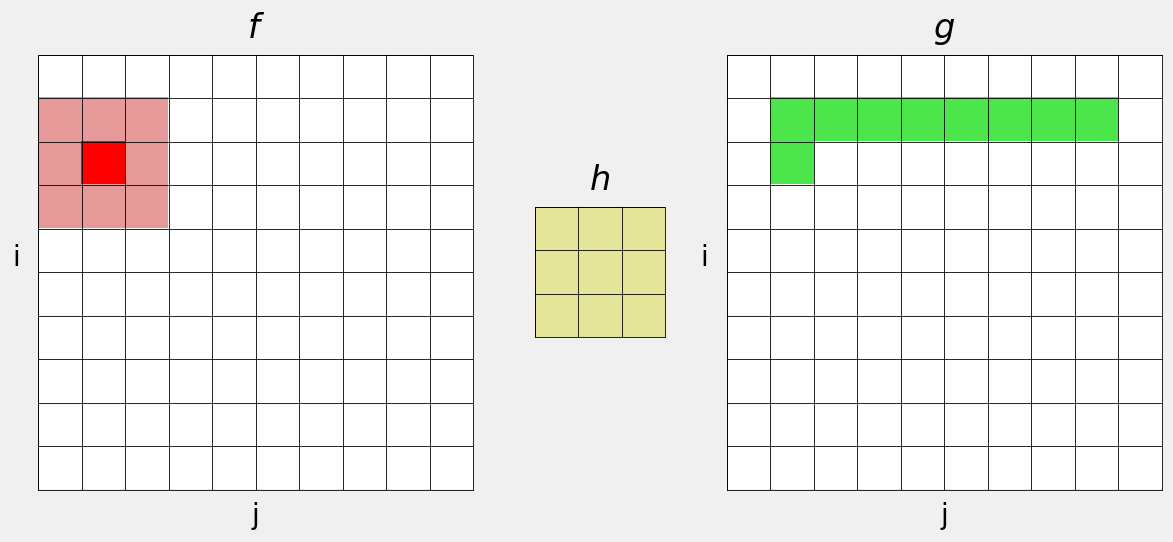
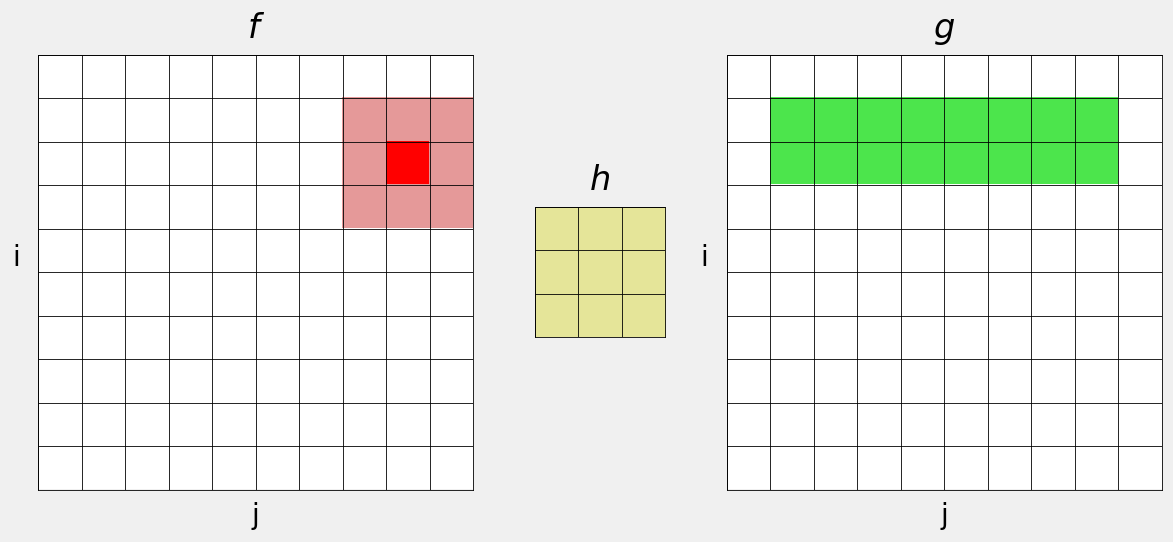
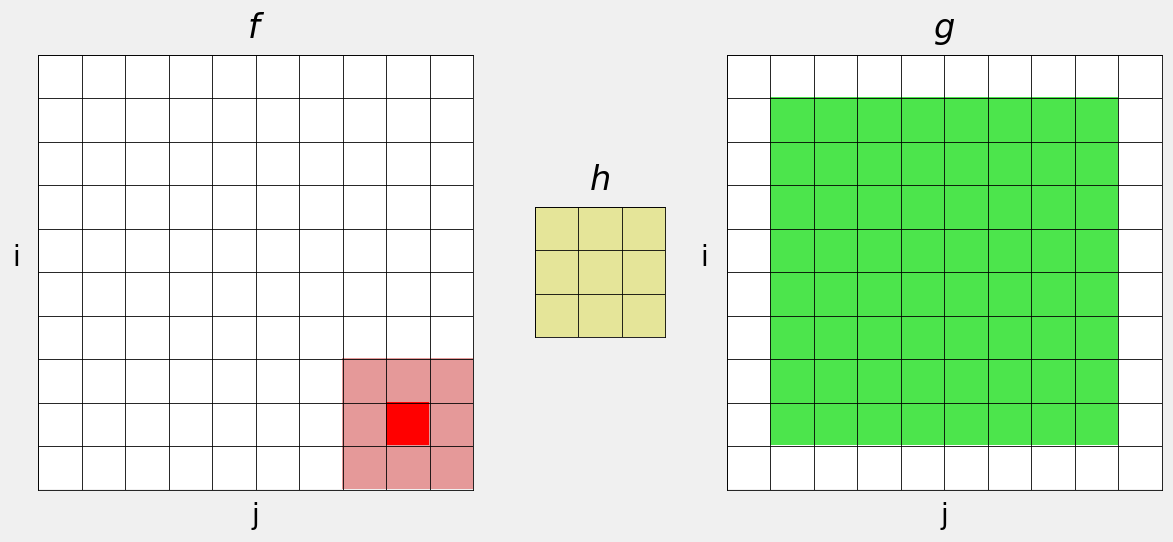
The filter window falls off the edge of the image.
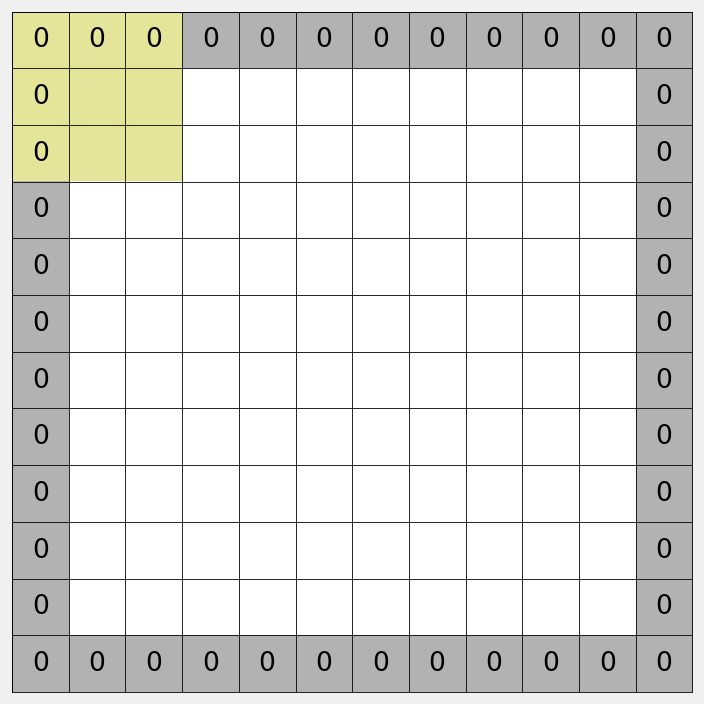
A common strategy is to pad with zeros.
The image is effectively larger than the original.
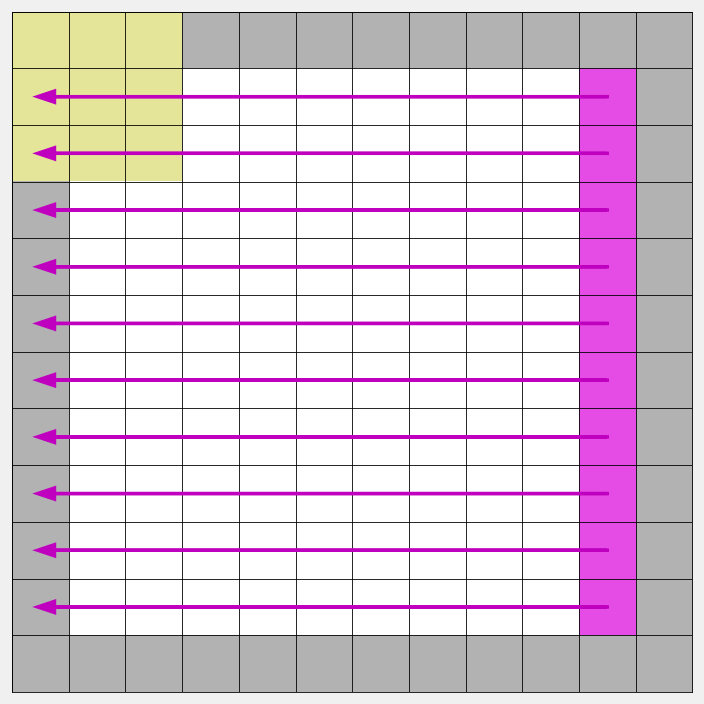
We could wrap the pixels, from each edge to the opposite.
Again, the image is effectively larger.
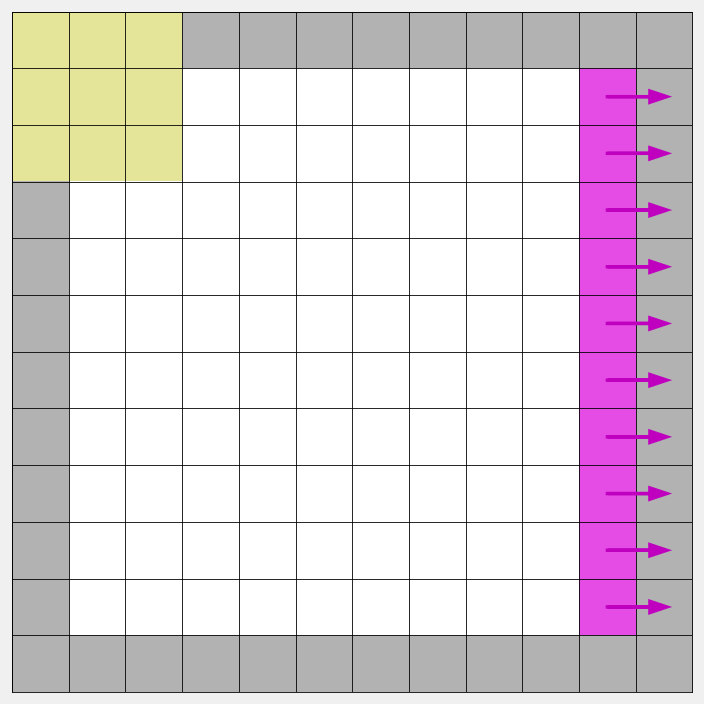
Alternatively, we could repeat the pixels, extending each edge outward.
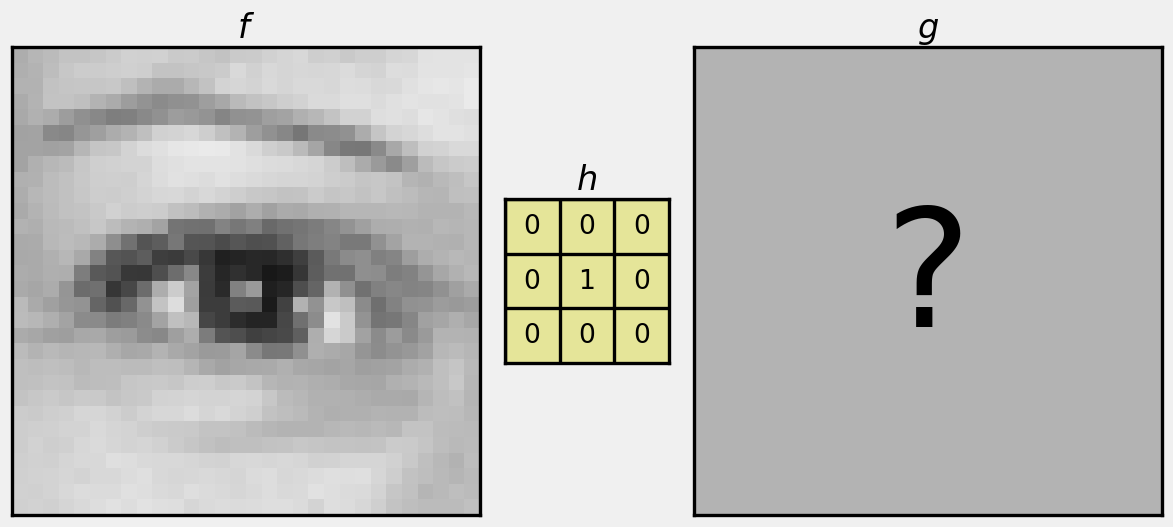
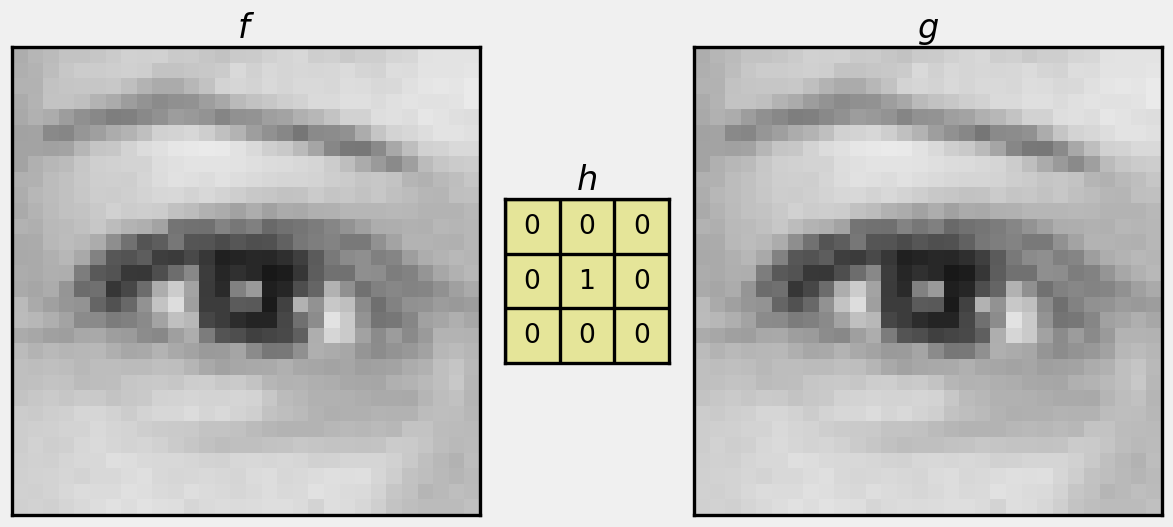
What would the filtered image look like?
No change!
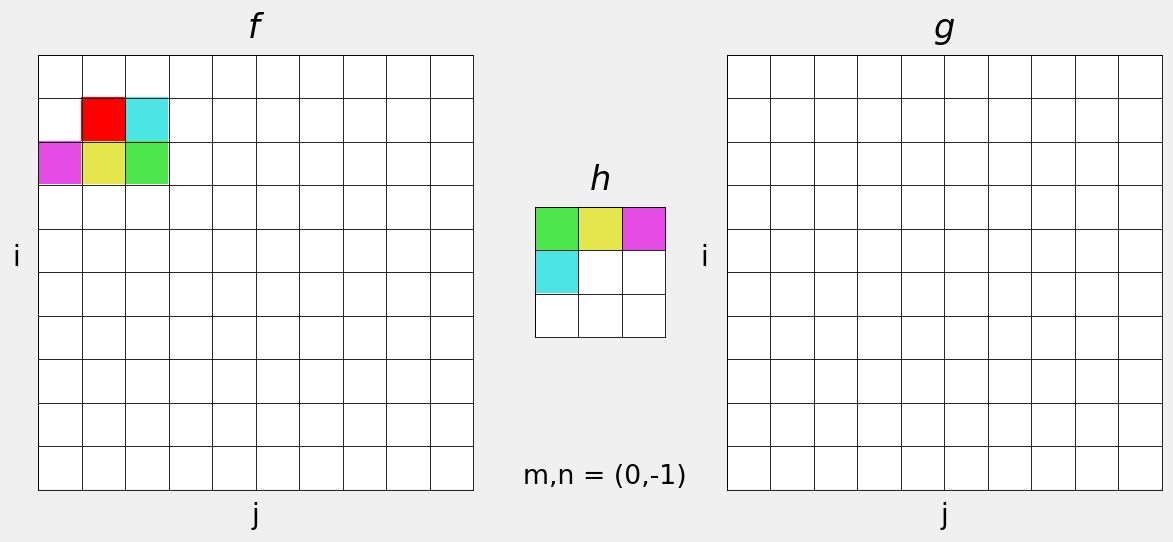
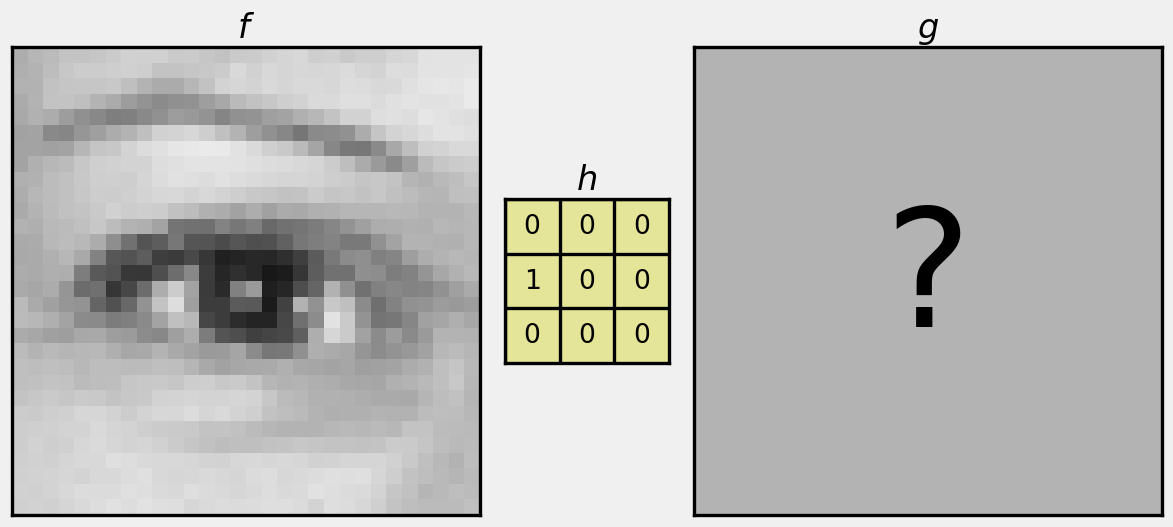
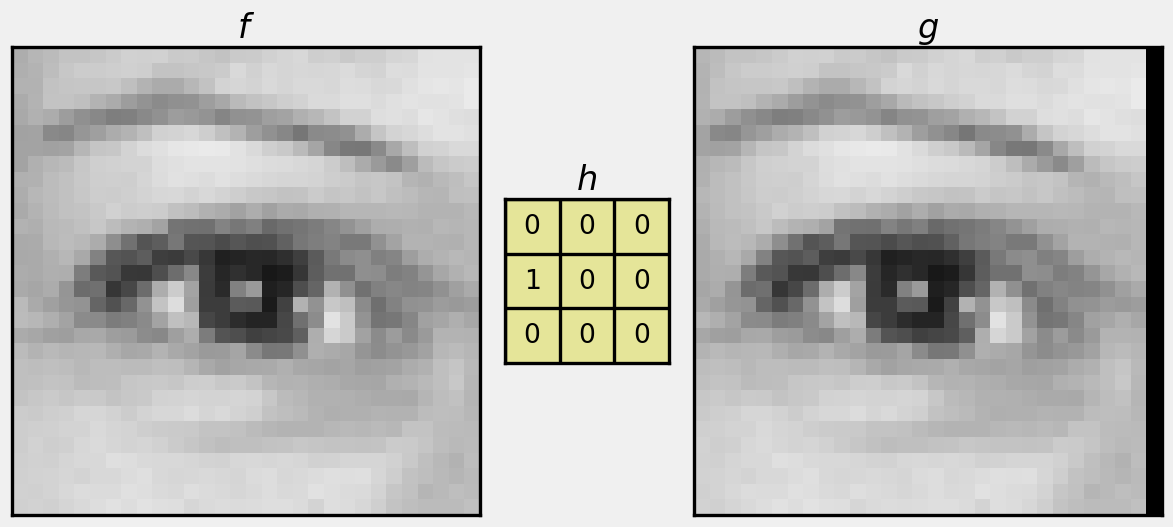
What would the filtered image look like?
Shifted left by 1 pixel.
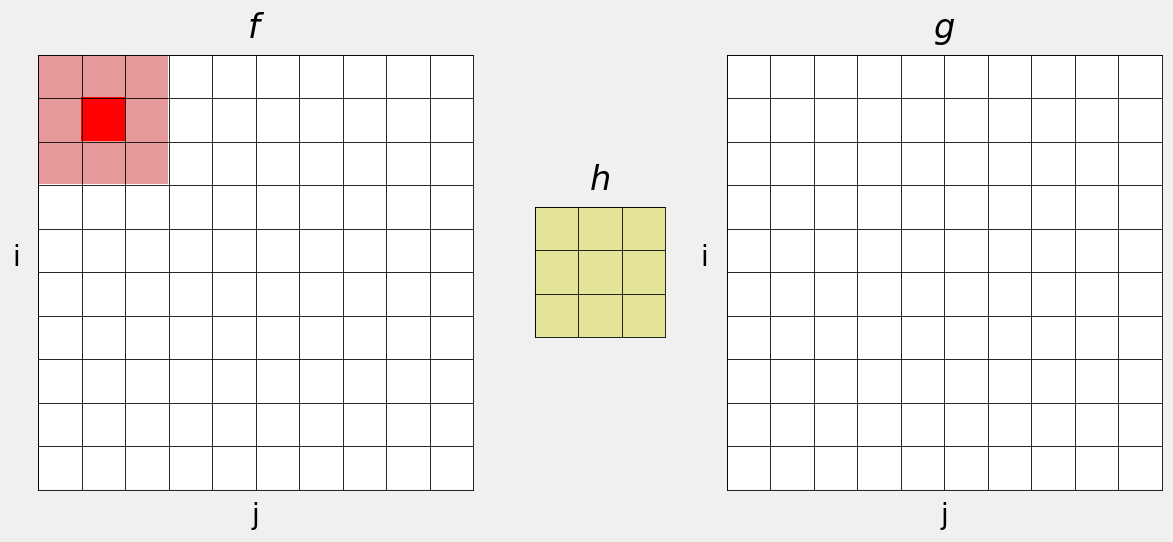
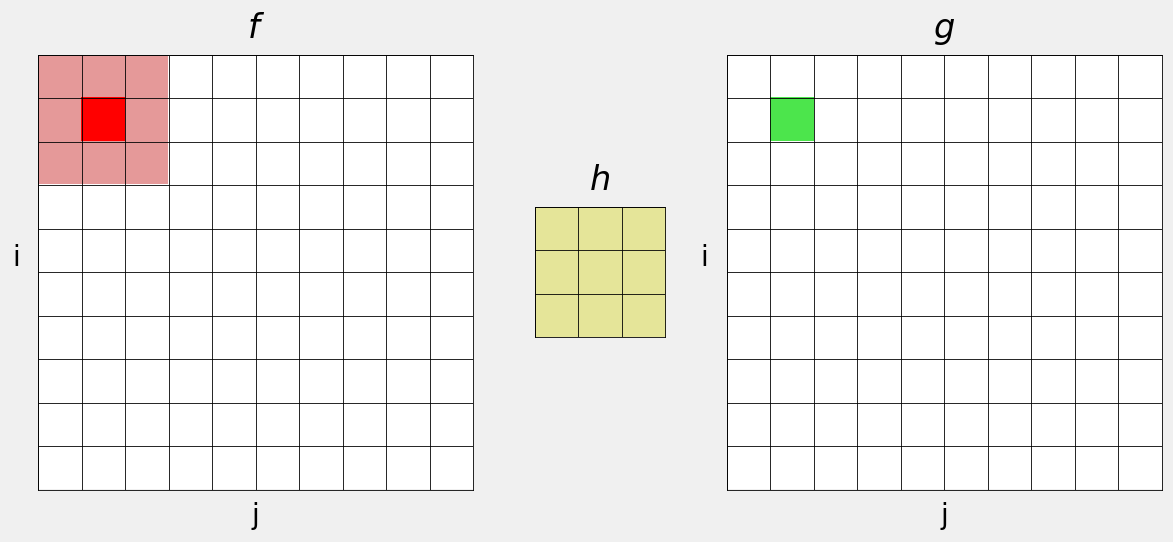
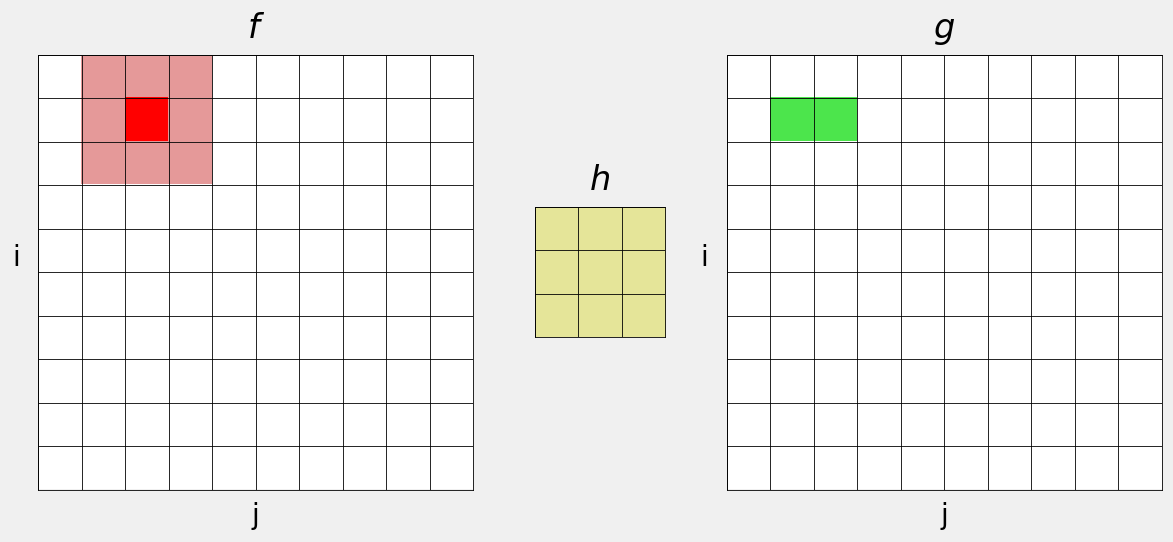
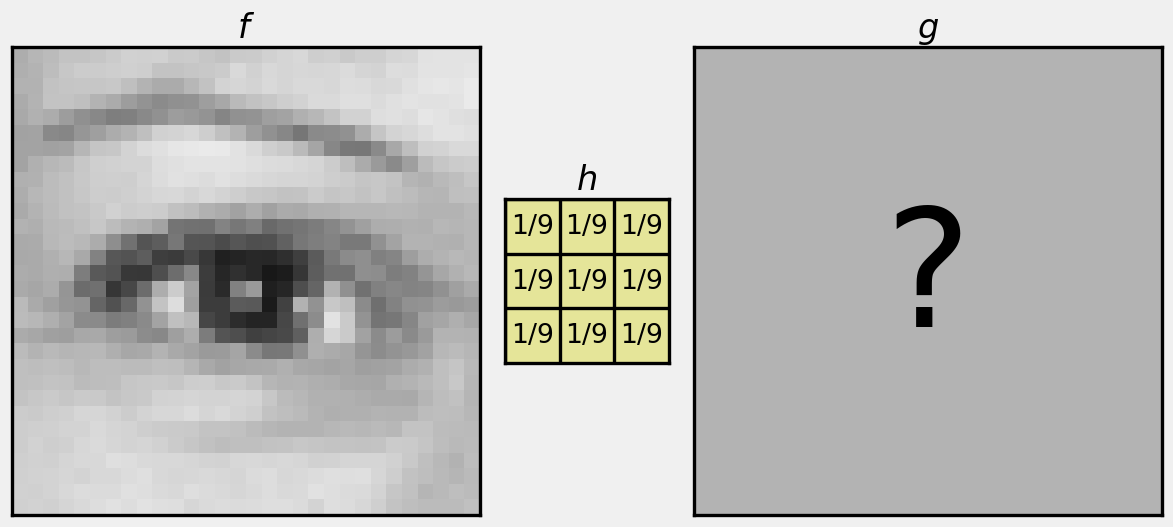
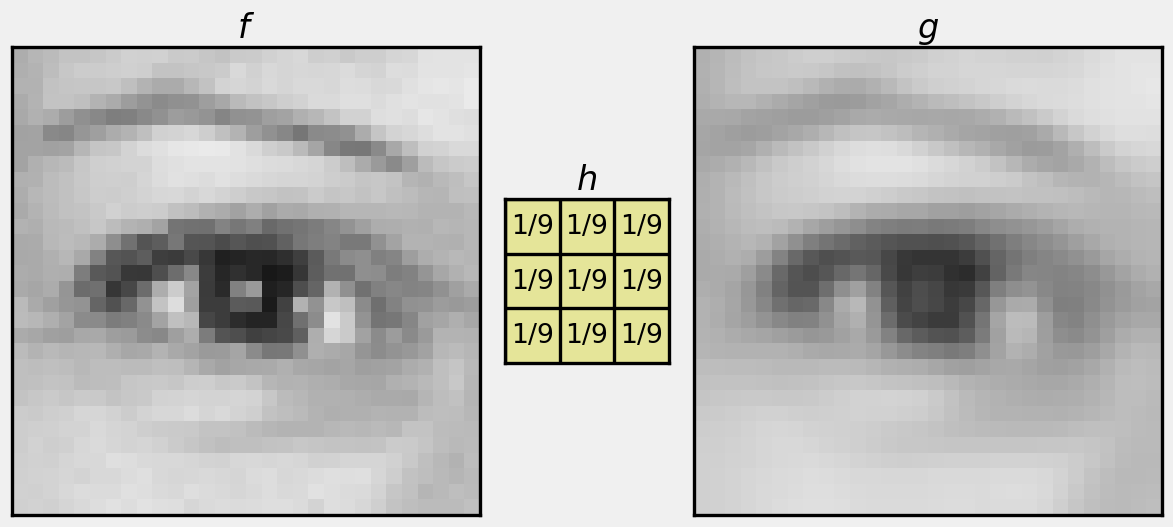
What would the filtered image look like?
Blurred…
What would the filtered image look like?