Order-Statistics Filters
Linear filters compute the sum of products between kernel coefficients and the image neighbourhood.
Instead, replace intensity with a measure obtained by ordering the pixel intensities in the neighbourhood.
- Common filters are median, max and min.
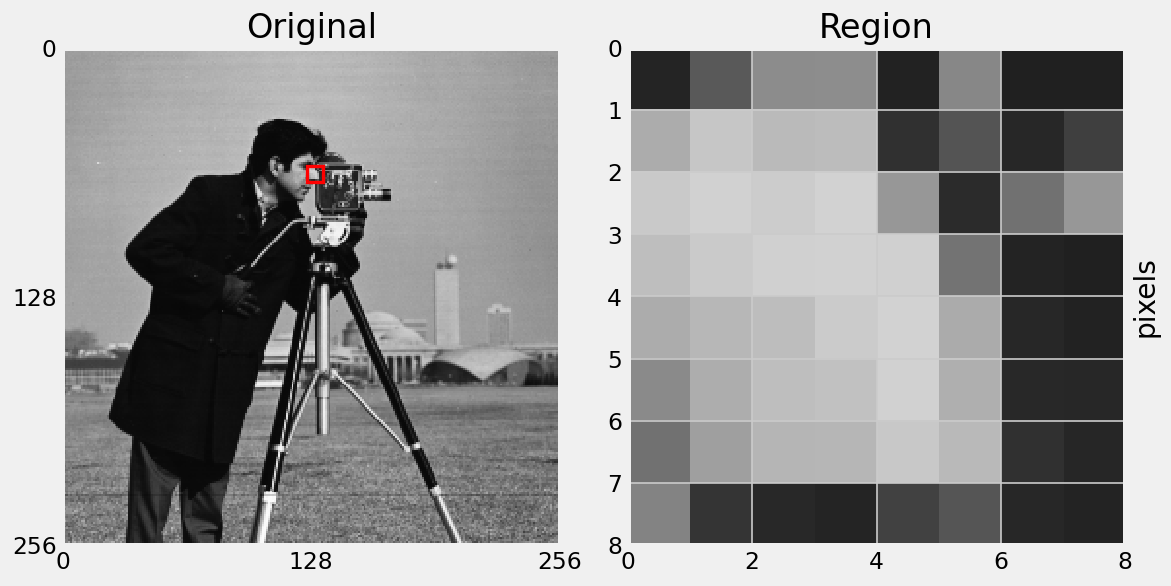
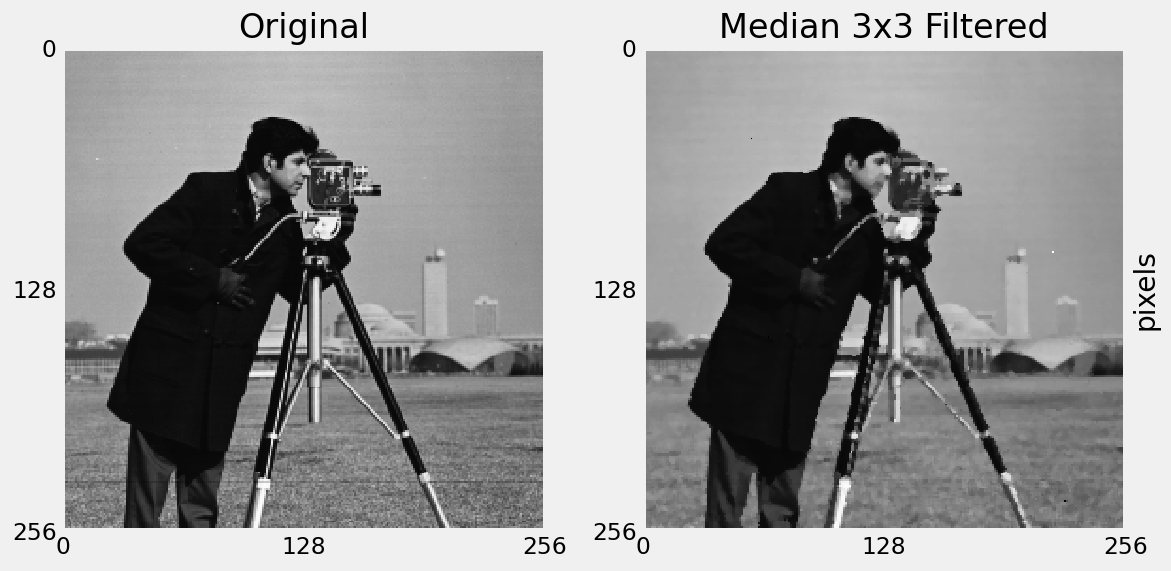
Crop a part of a larger image to uses as an example.
![Cameraman crop]() Cameraman crop
Cameraman crop
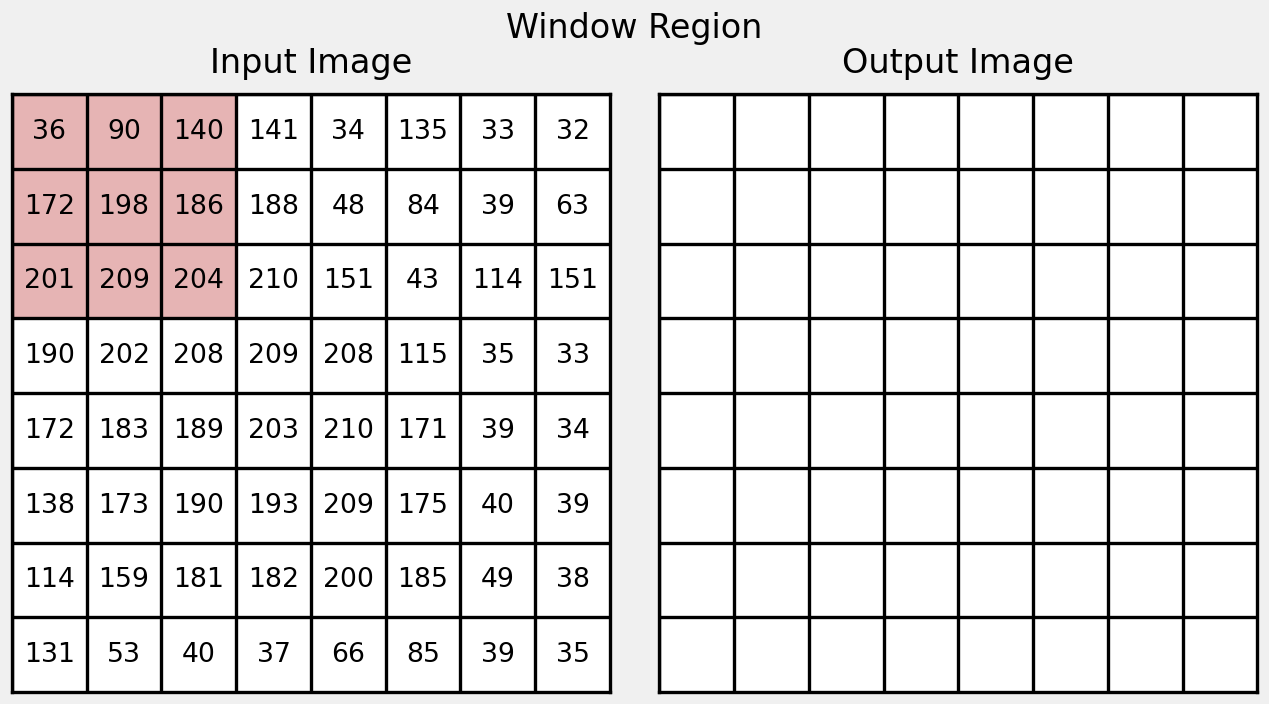
First, window a region of size 3x3:
![region window]() region window
region window
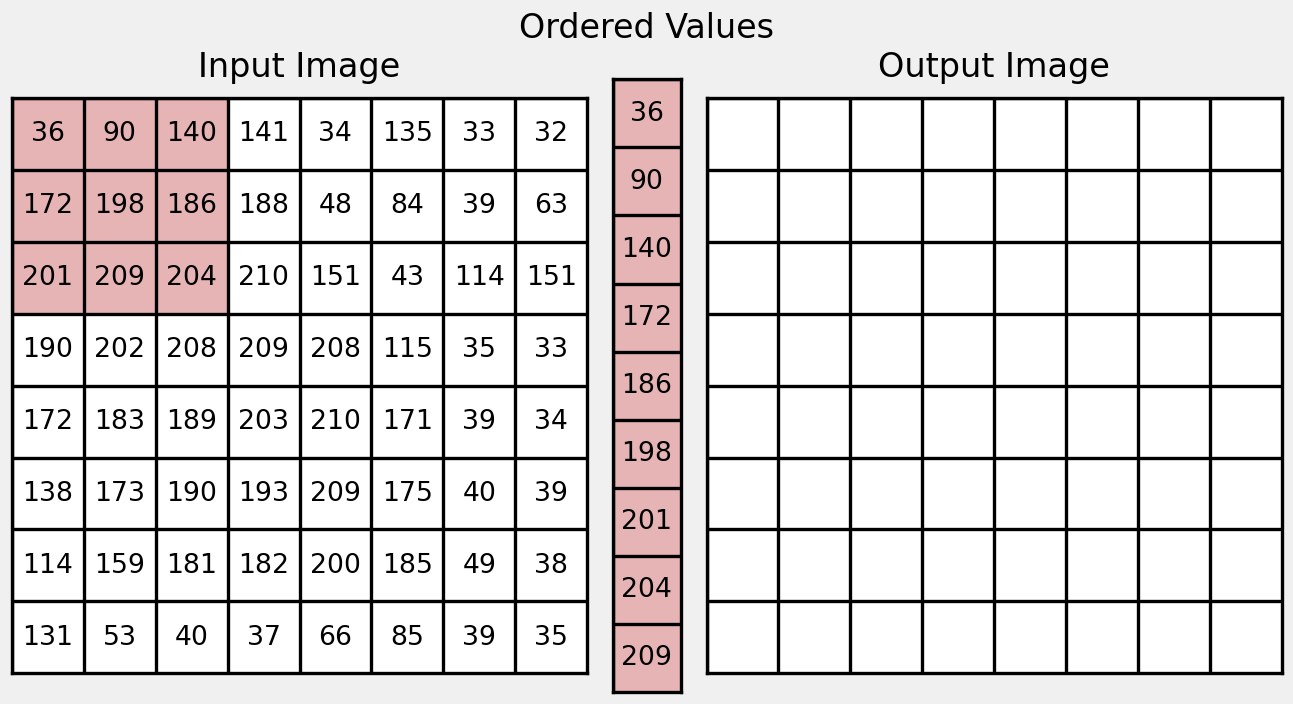
Sort the intensities in the region:
![ordered values]() ordered values
ordered values
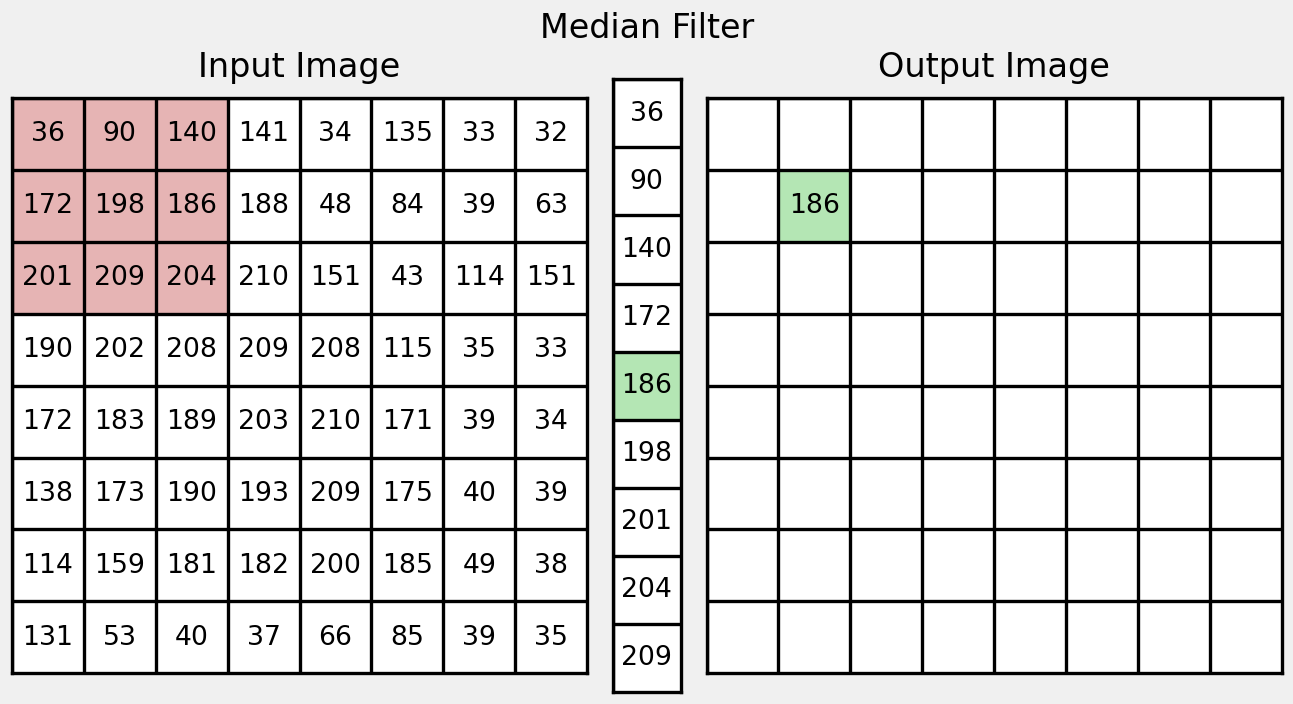
Sort the intensities in the region, and select the middle value:
![median value]() median value
median value
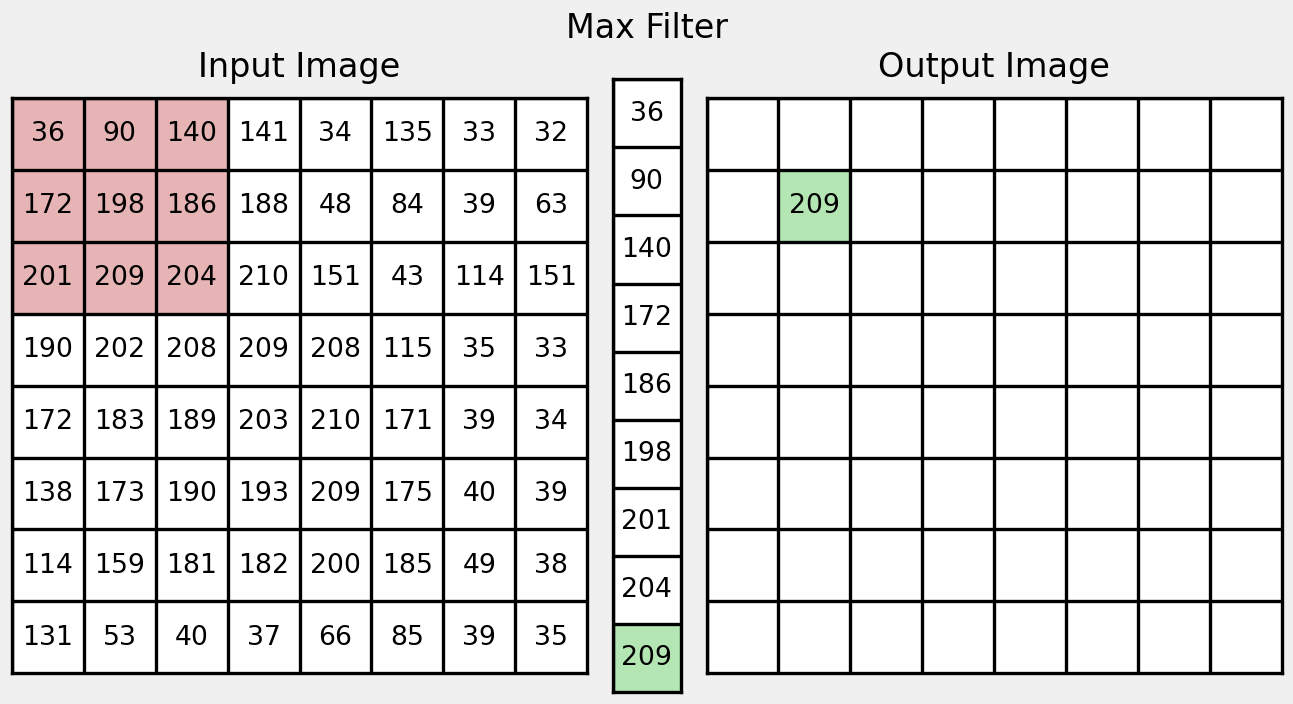
Max filter is similar to median filter, but selects the maximum value:
![maximum value]() maximum value
maximum value
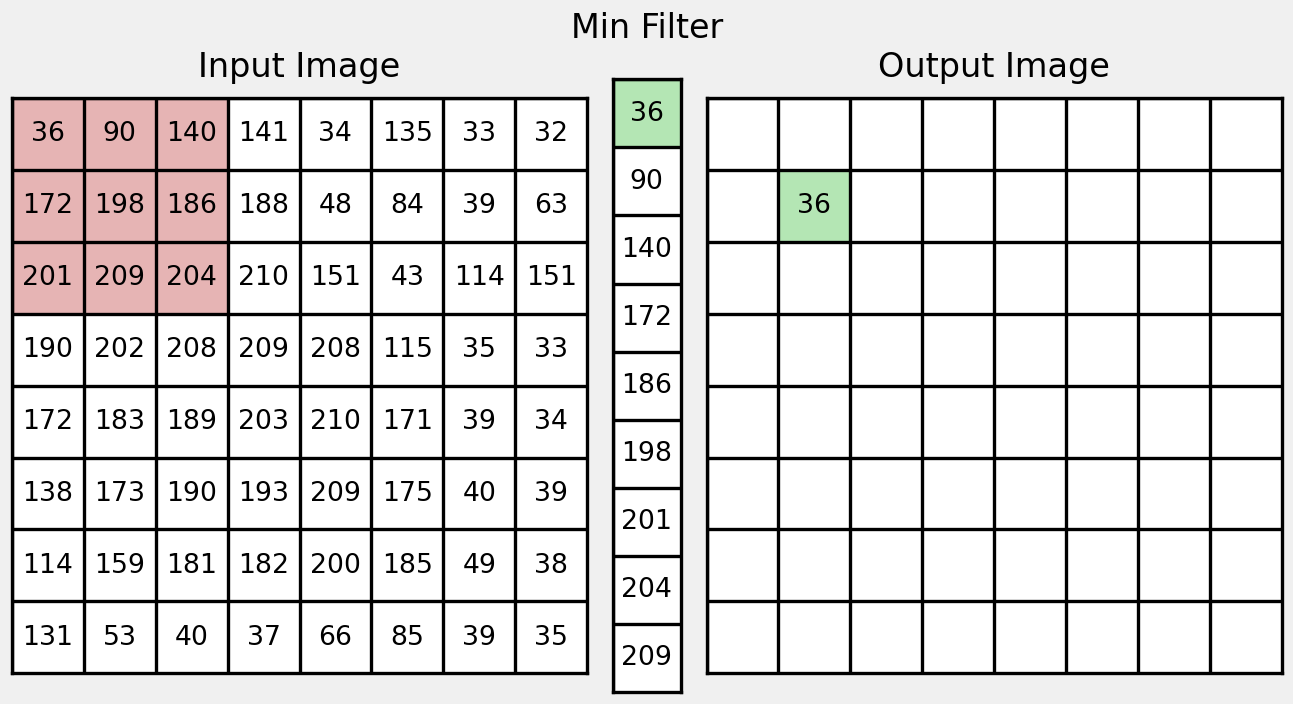
Min filter is again similar, but selects the minimum value:
![minimum value]() minimum value
minimum value
Order-statistics filters are good for noise removal where:
- Noise is random
- Noise is not dependent on surrounding pixels
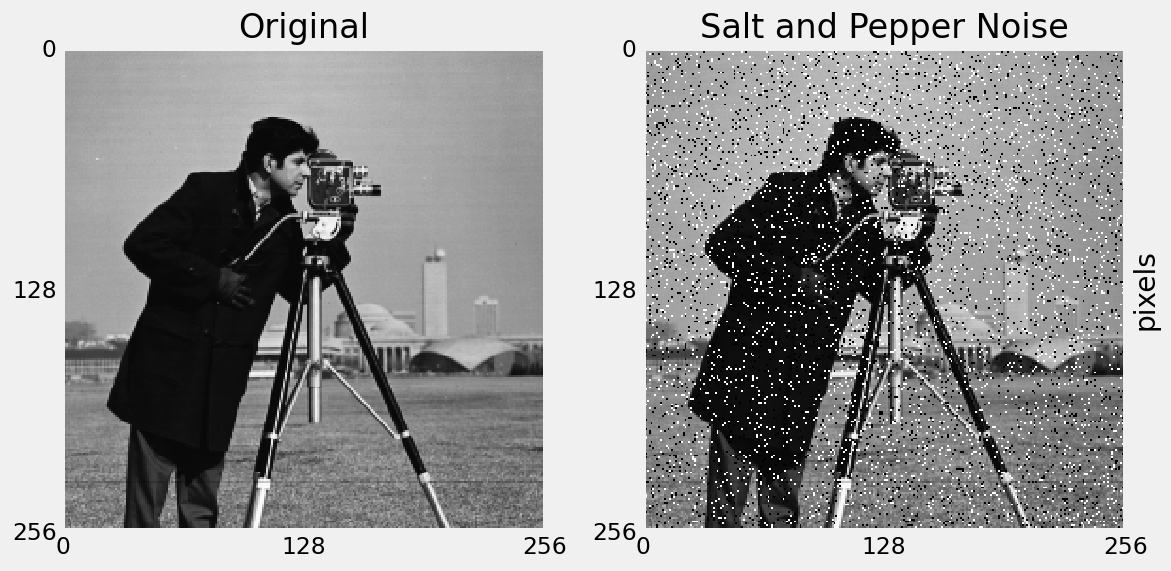
For example, the salt and pepper noise model:
- Noisy pixels are the outliers in the local neighbourhood
- Replace outliers with estimate from image data
Aside: What is salt and pepper noise?
- Also called impulse noise.
- Can be hardware dependent - hot pixels or dead pixels.
- Artificially applied by random selecting a subset of pixels and setting to black or white.
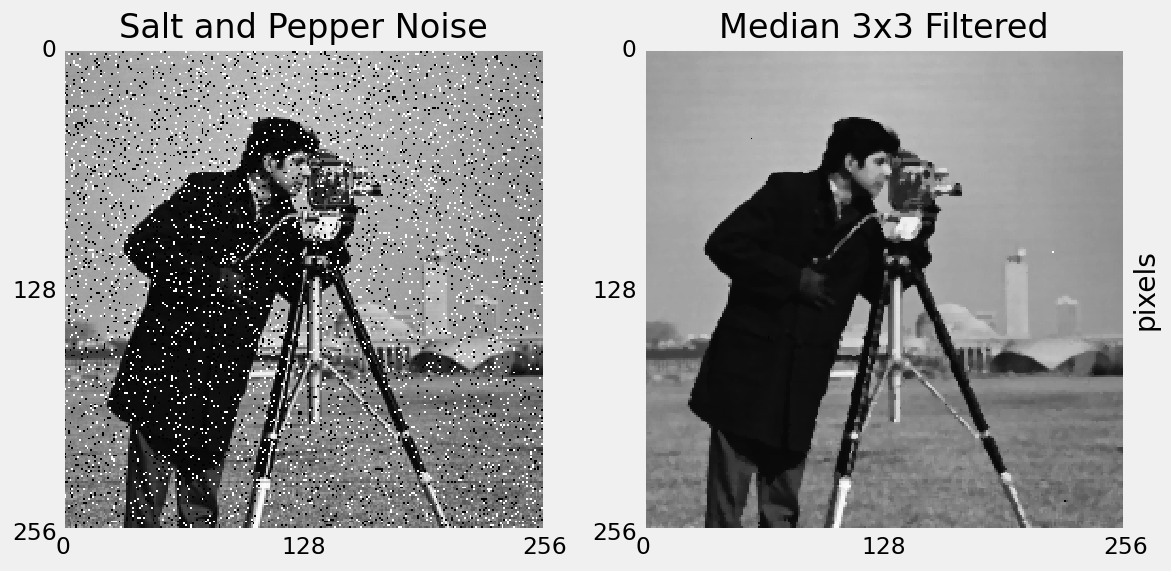
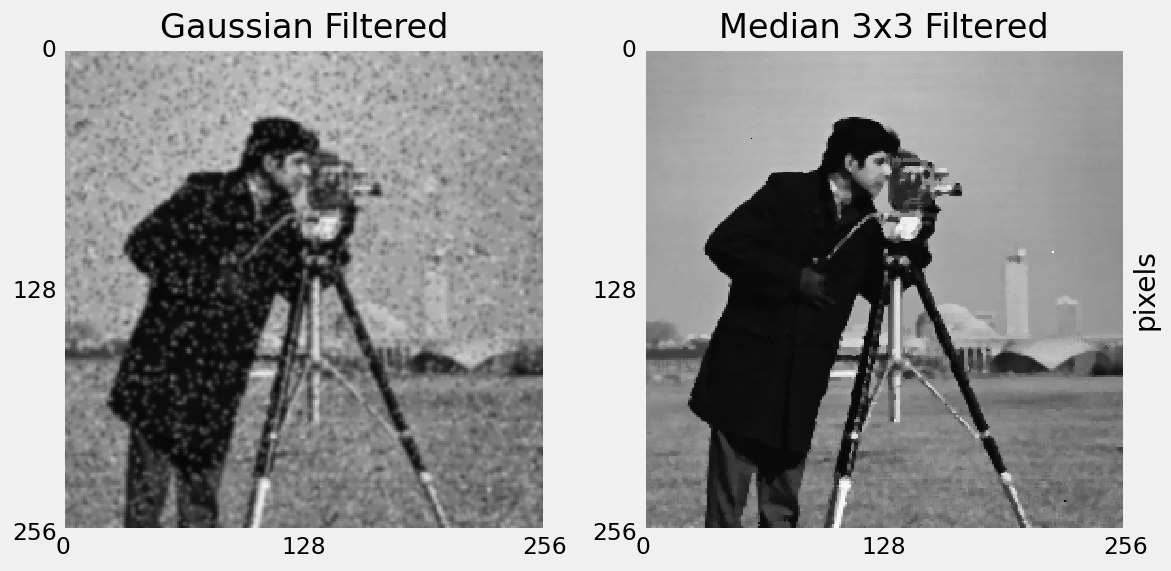
Noise removal
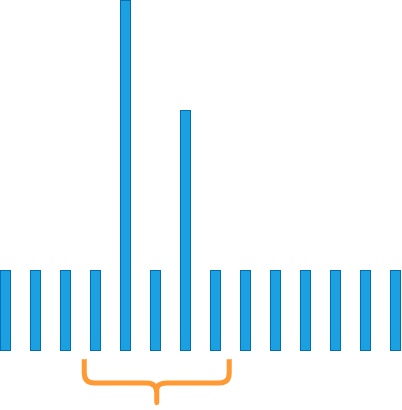
If we consider this 5 pixel neighbourhood, what will the median filter do?
Noise removal
The median filter removes spike noise.
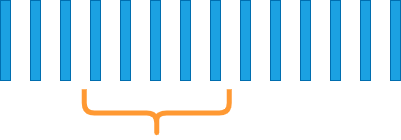
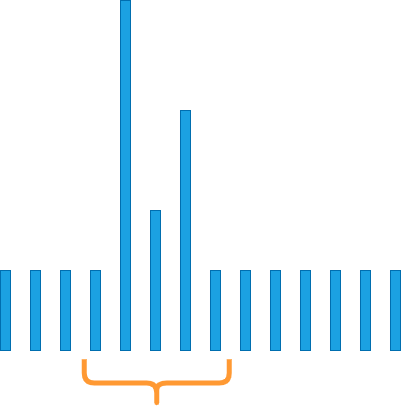
- What will the gaussian filter do?
Noise removal
The Gaussian filter amplifies noise.
Morphological Filters
Operation of the filter is characterised by mathematical morphology.
- Embedded in set theory.
- Useful for thickening and thinning edges and de-noising binary images
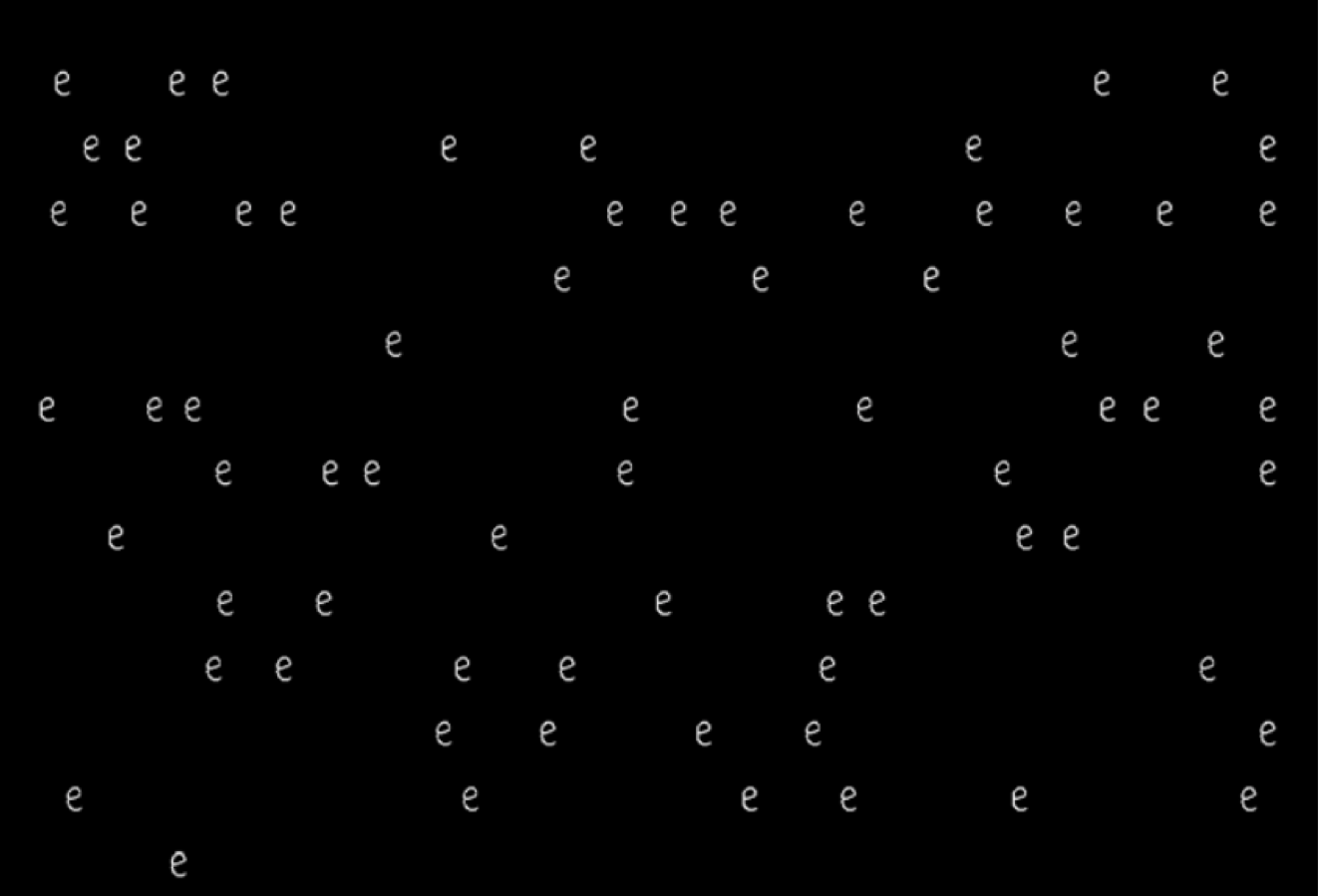
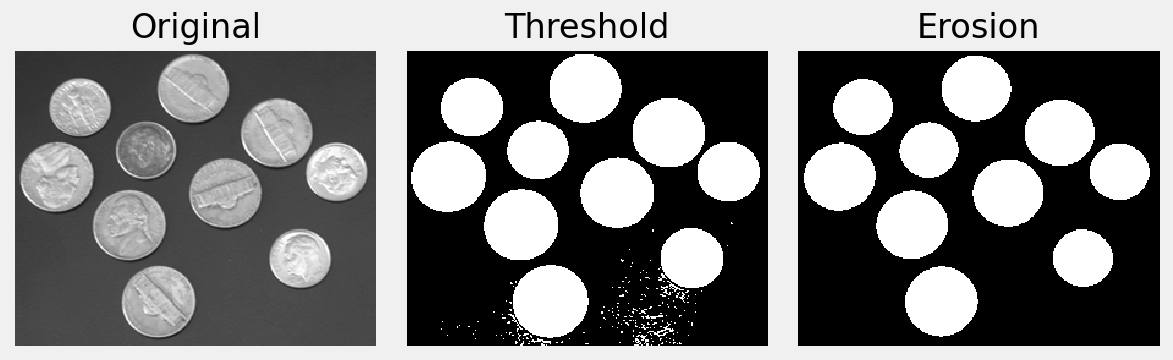
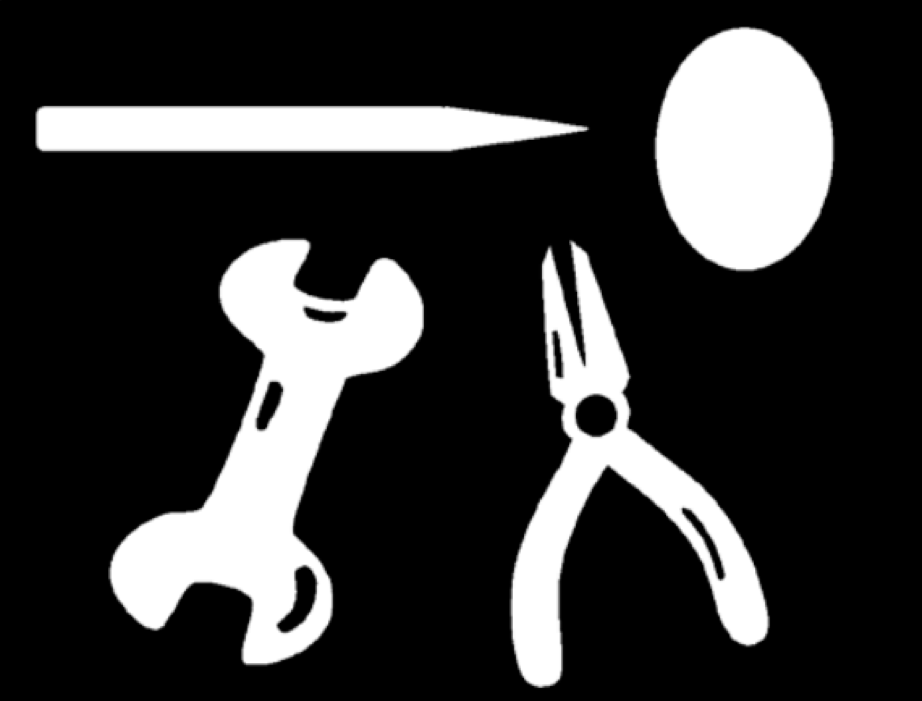
Motivation
![Filtered Threshold Image]() Filtered Threshold Image
Filtered Threshold Image
Morphological Filters
For binary images:
- White pixels (with intensity 1) can be considered elements in a set.
- Black pixels (with intensity 0) can be considered elements outside of the set.
- Morphological filters are essentially set operations.
Set Notation
\[\text{Let } A \text{ be a set in } \mathbb{Z}^{2}\]
the set of all integers in 2 dimensions…
Set Notation
\[ a \in A \text{ if } a = (x, y) \text{ is an element of set } A \]
this is the element symbol…
Set Notation
\[ a \notin A \text{ if } a \text{ is not in } A \]
not in…
Set Notation
\[ C = \{ w|w = -d, ~ for ~ d \in D \} \]
the set of all \(w\) such that…
Set Notation
\[\emptyset \text{ is the empty set} \]
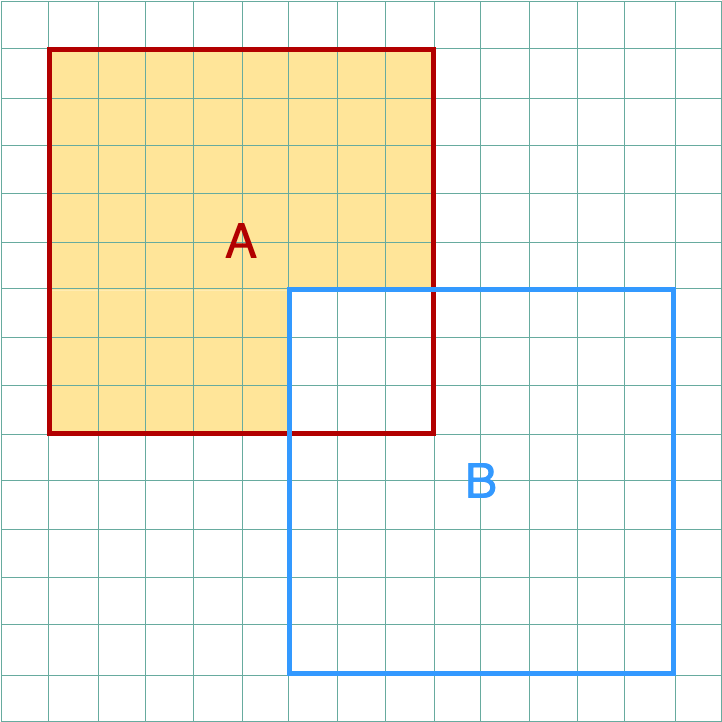
Set Operations
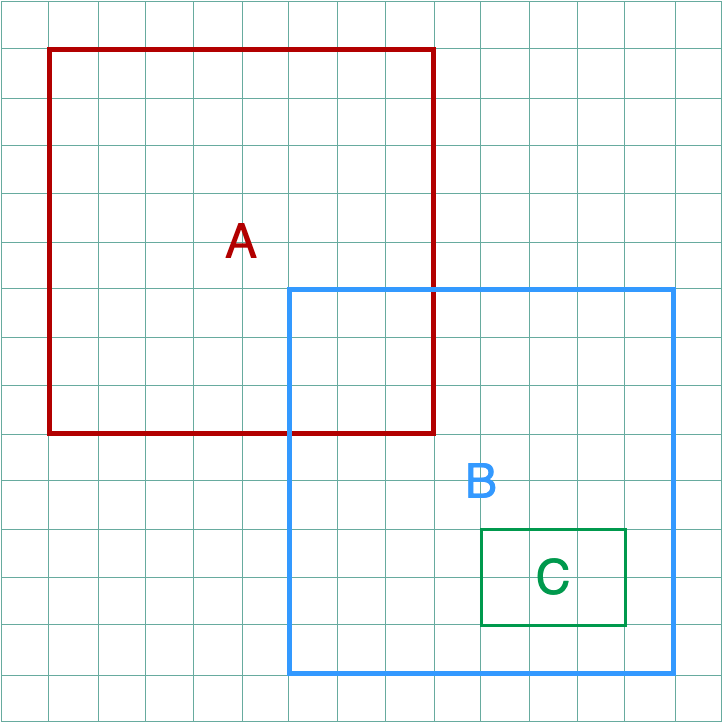
Given two sets, A and B, the following can be defined:
Set Operations
\[C \subseteq B, A \nsubseteq B\]
Subset: a set where all members belong to a given set.
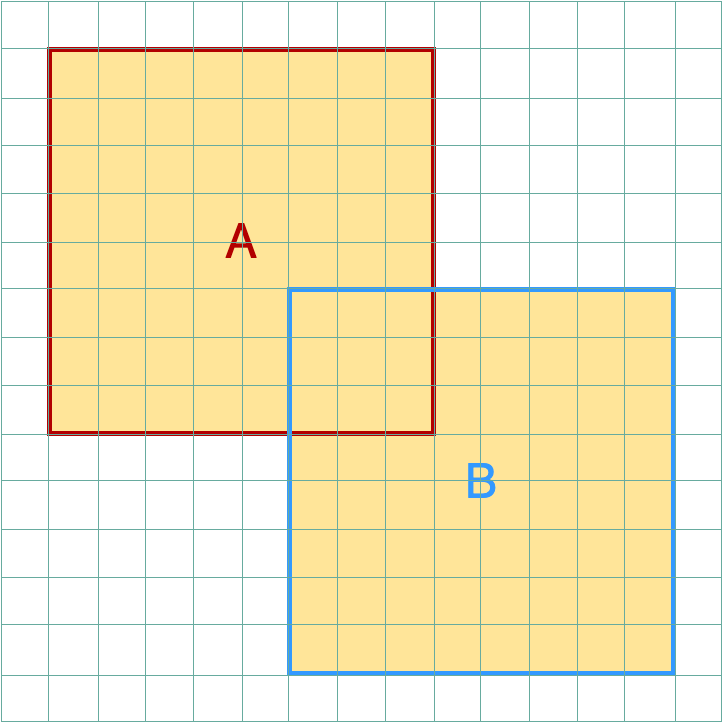
Set Operations
\[A \cup B\]
Union: all elements that are either in set A or set B.
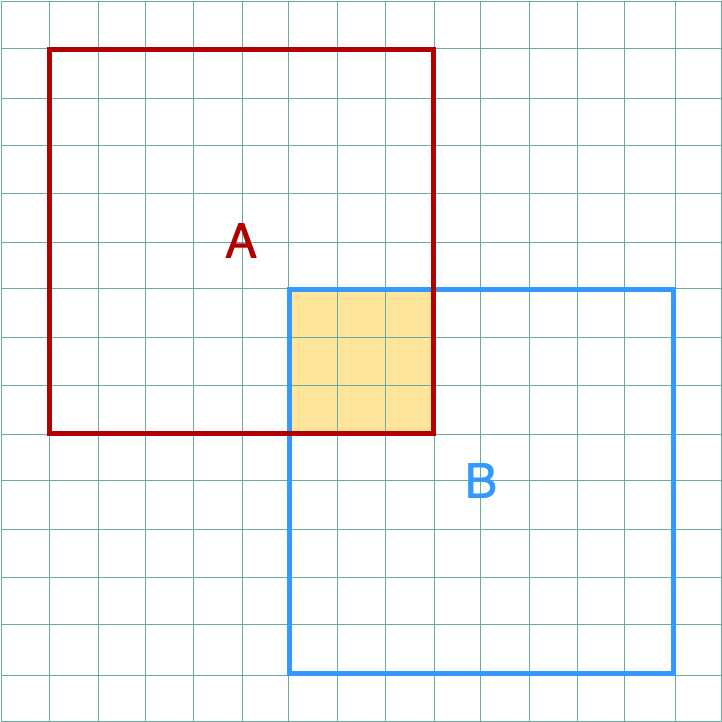
Set Operations
\[A \cap B\]
Intersection: all elements that are common to both A and B.
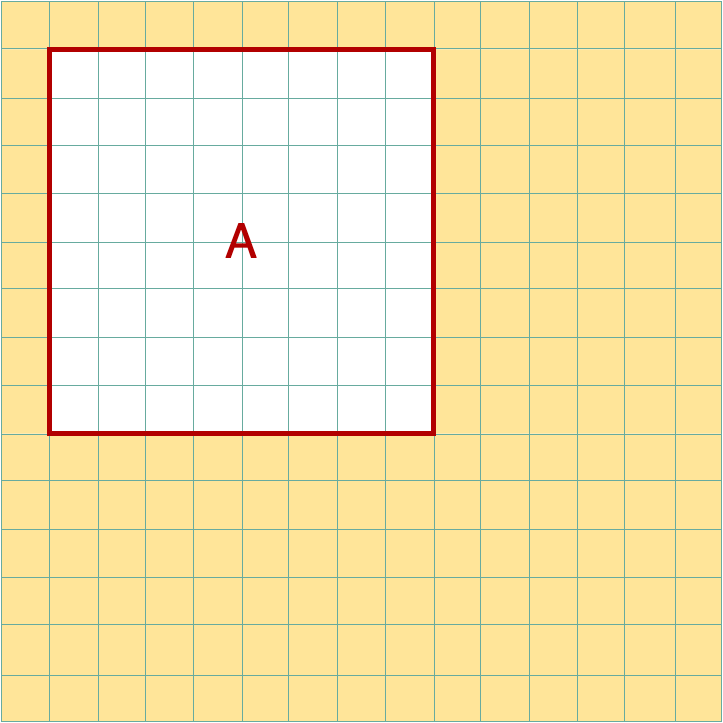
Set Operations
\[A^{c} \{w|w ~\notin ~ A\}\]
Complement: the elements not contained in set A
Set Operations
\[A \setminus B = \{w|w ~\in ~ A,~ w ~\notin ~ B \}\]
Difference: the elements of set A that are not in set B
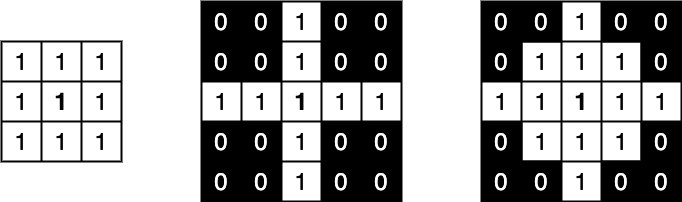
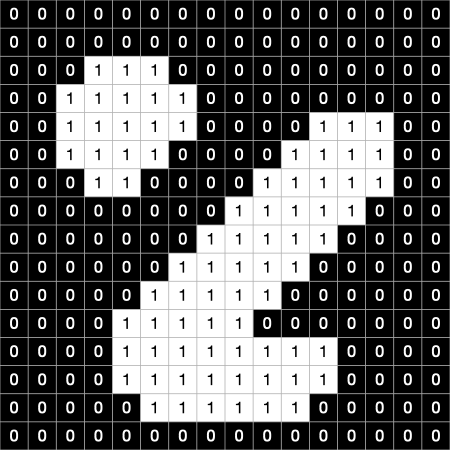
Dilation
\[A \oplus B = \{ x, y| B_{x, y} \cap A \neq \emptyset \} \]
Defines dilation of binary image \(A\) by structuring element \(B\).
Calculate the binary OR of elements in \(A\) masked by \(B\).
The structuring element hits the image.
Dilation
![binary image]() binary image
binary image
\[A \oplus B\]
![structured element]() structured element
structured element
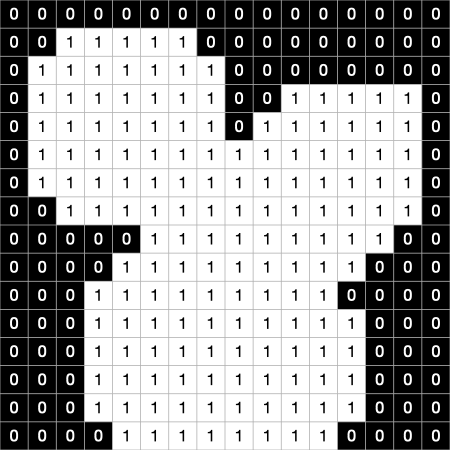
Dilation
![binary image]() binary image
binary image
![dilated image]() dilated image
dilated image
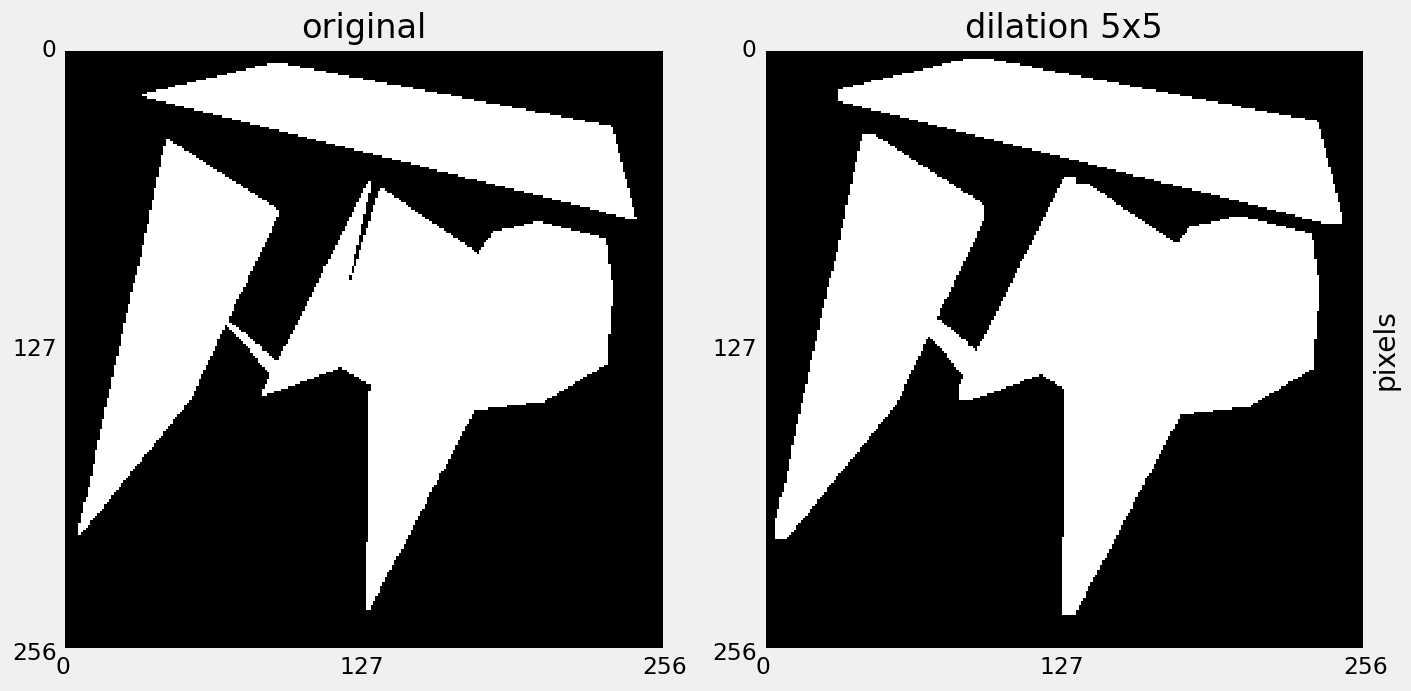
Dilation Example
![dilation 5x5]() dilation 5x5
dilation 5x5
Dilation Example
![dilation 15x15]() dilation 15x15
dilation 15x15
Dilation
- Expands the size of 1-pixel objects
- Smoothes object boundaries
- Closes holes and gaps
- Regions grow
Erosion
\[A \ominus B = \{ x, y| B_{x, y} \subseteq A \} \]
Defines erosion of binary image \(A\) by structuring element \(B\).
Calculate the binary AND of elements in \(A\) masked by \(B\).
The structuring element fits the image.
Erosion
![binary image]() binary image
binary image
\[A \ominus B\]
![structured element]() structured element
structured element
Erosion
![binary image]() binary image
binary image
![eroded image]() eroded image
eroded image
Erosion Example
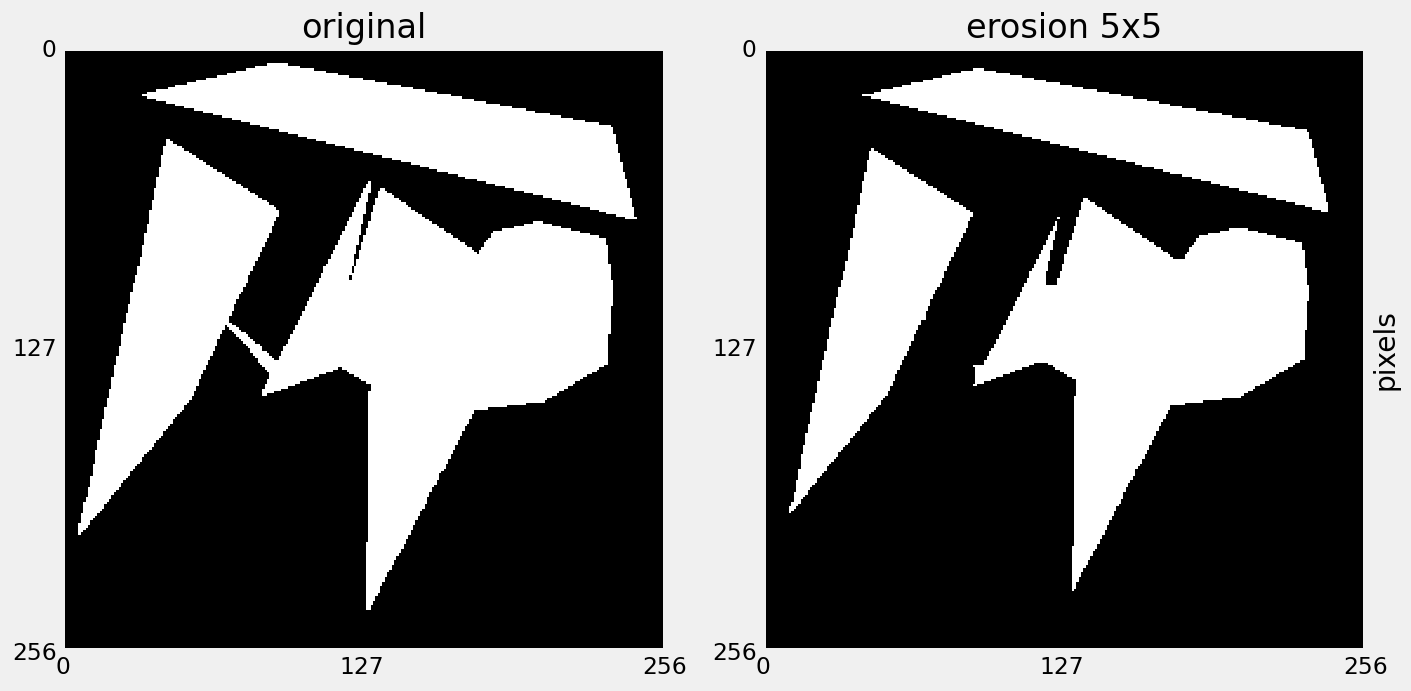
![erosion 5x5]() erosion 5x5
erosion 5x5
Erosion Example
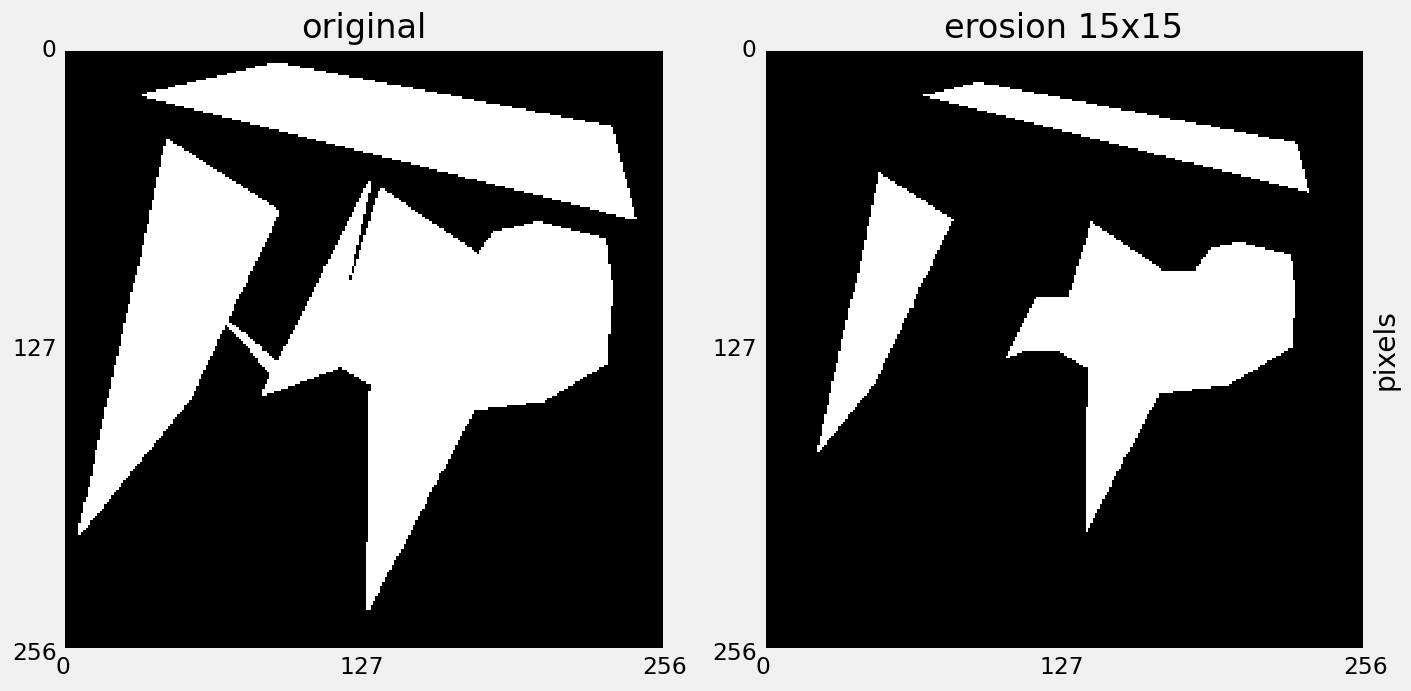
![erosion 15x15]() erosion 15x15
erosion 15x15
Erosion
- Shrinks the size of 1-valued objects.
- Smooths object boundaries.
- Removes peninsulas, fingers, and small objects (such as noise).
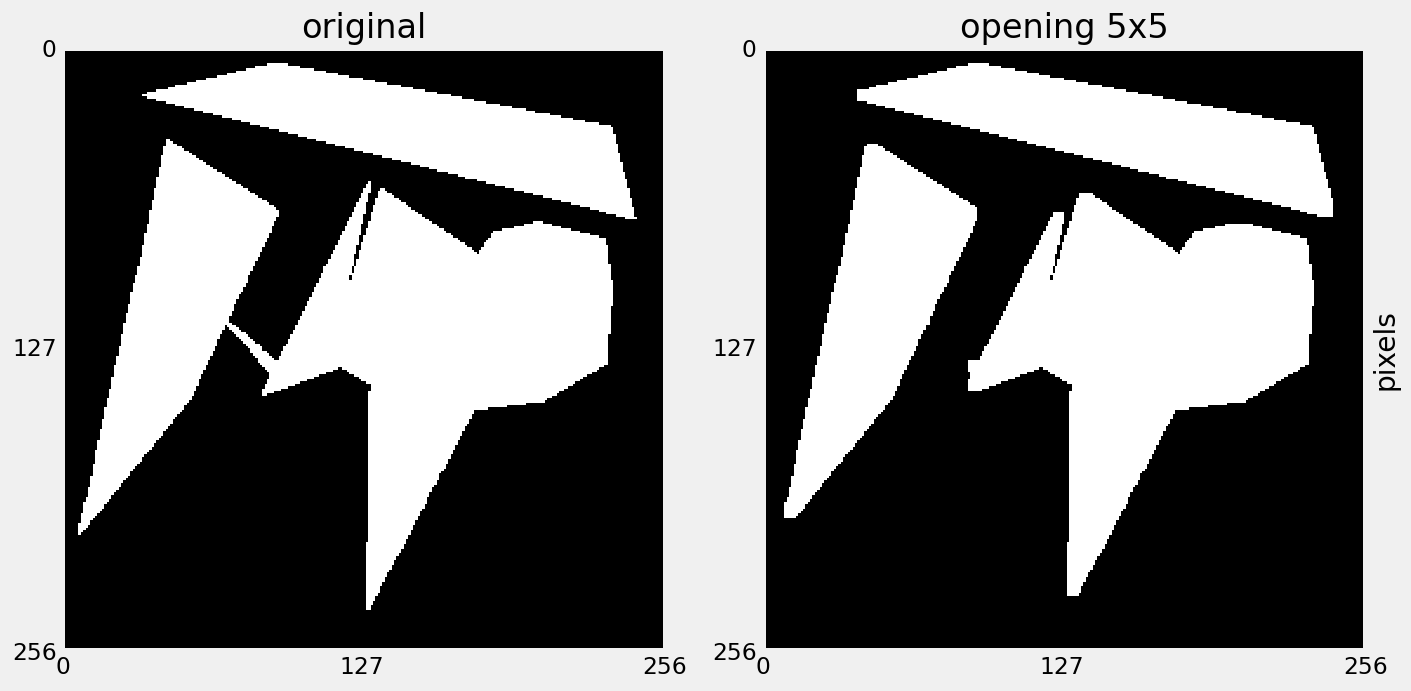
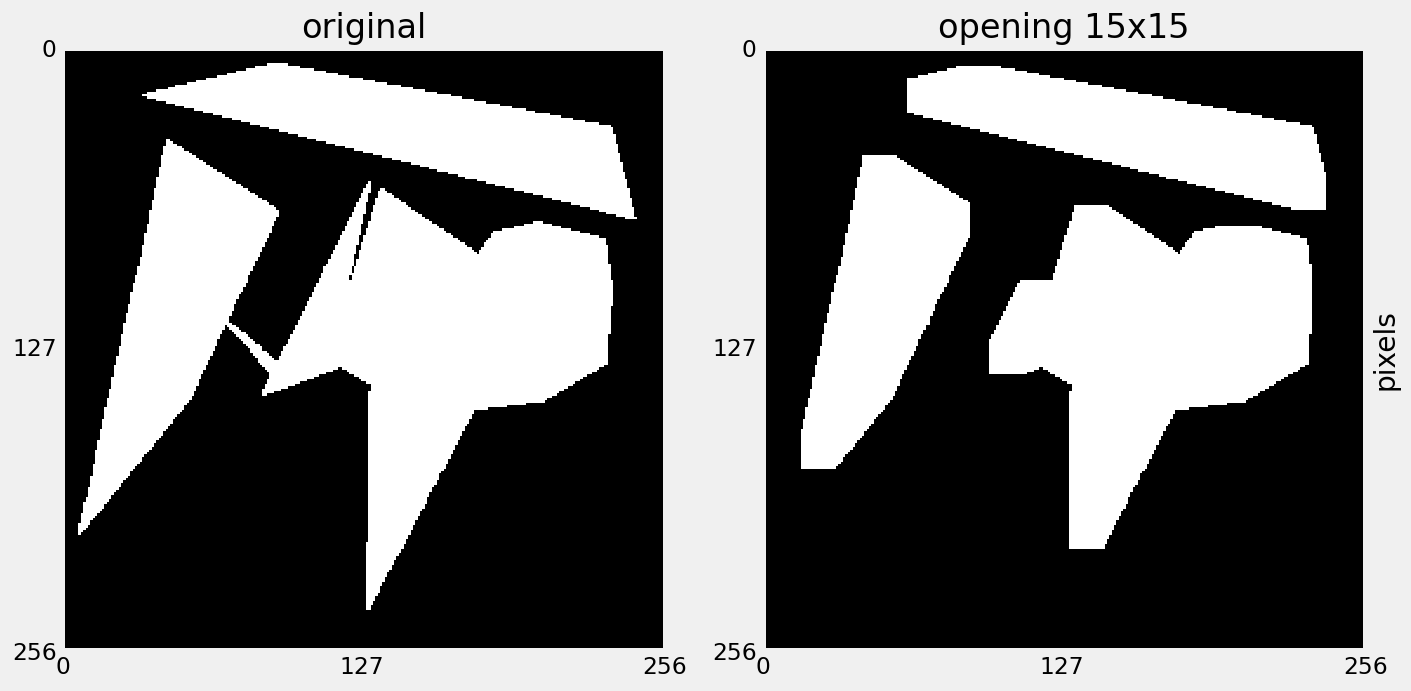
Opening
\[A \circ B = (A \ominus B) \oplus B \]
Erosion followed by Dilation.
- Has the effect of smoothing contours by breaking narrow connections and eliminating thin protrusions.
Opening Example
![opening 5x5]() opening 5x5
opening 5x5
Opening Example
![opening 15x15]() opening 15x15
opening 15x15
Closing
\[A \bullet B = (A \oplus B) \ominus B \]
Dilation followed by Erosion.
- Has the effect of smoothing contours by filling narrow gulfs, holes and small gaps.
Closing Example
![closing 5x5]() closing 5x5
closing 5x5
Closing Example
![closing 15x15]() closing 15x15
closing 15x15
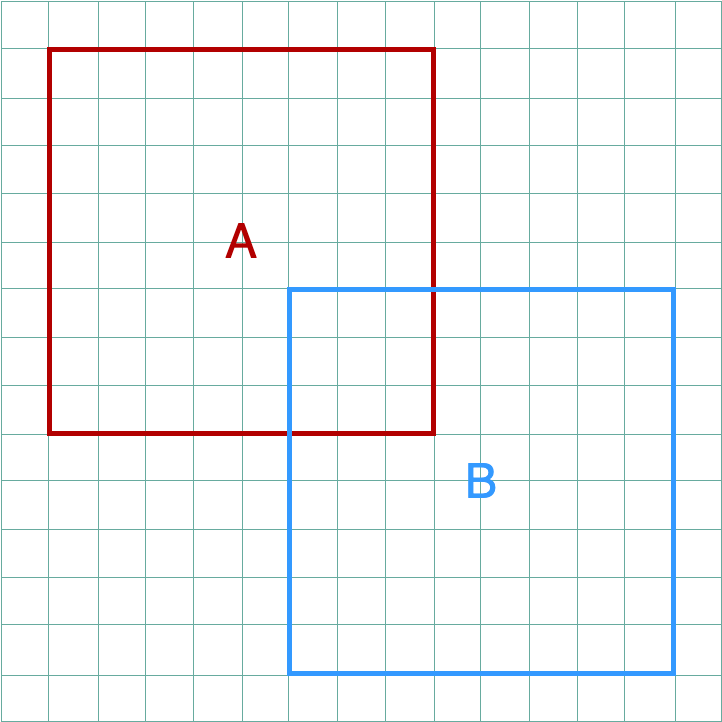
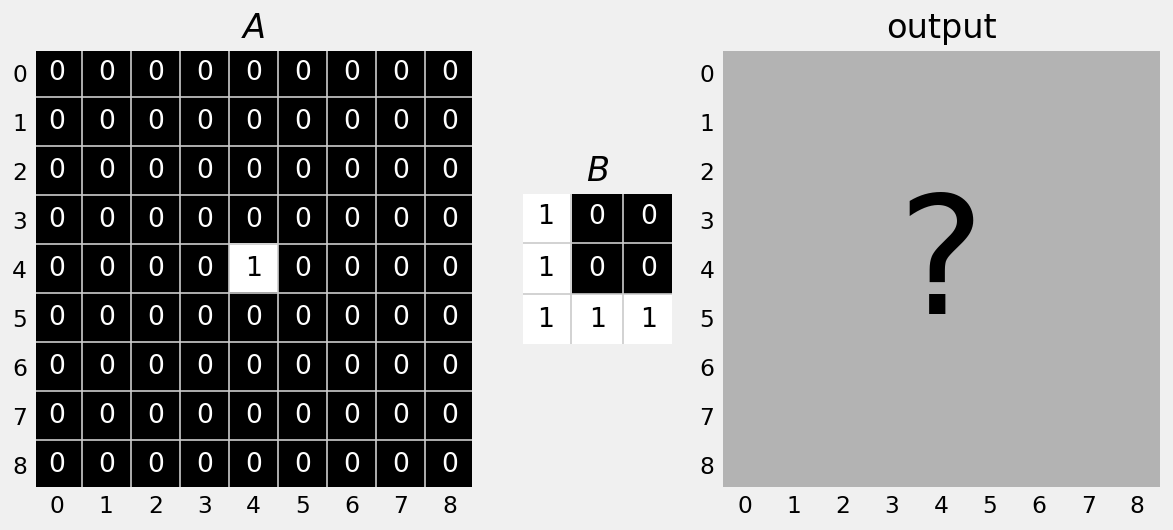
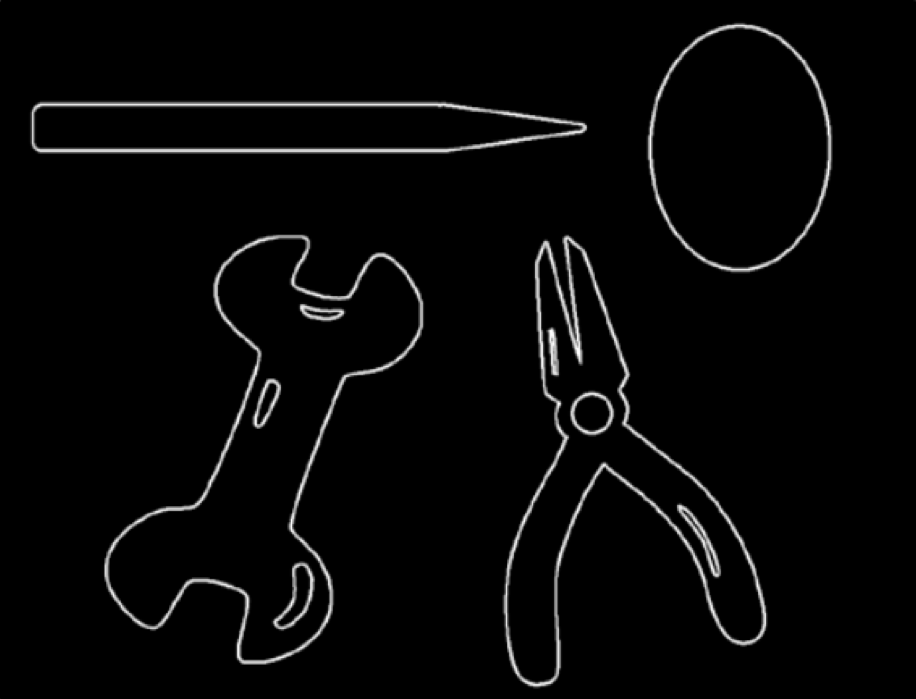
QUESTION?
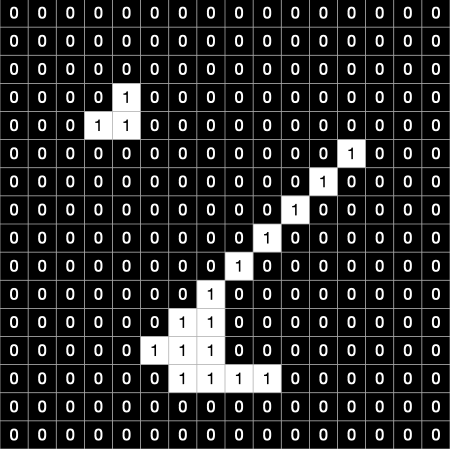
After performing dilation of A by B, what does the resulting binary image look like?
![]()
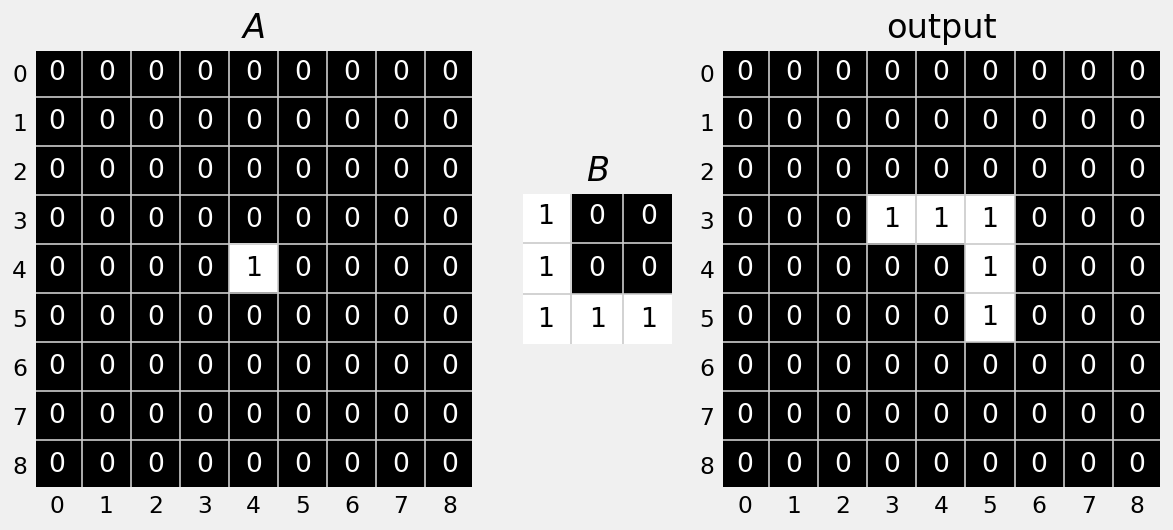
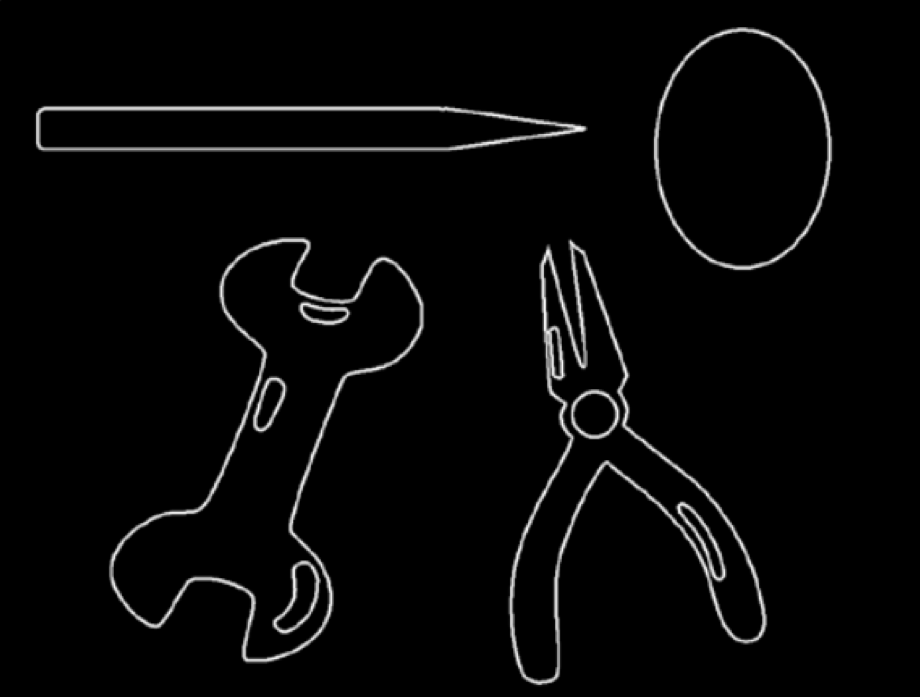
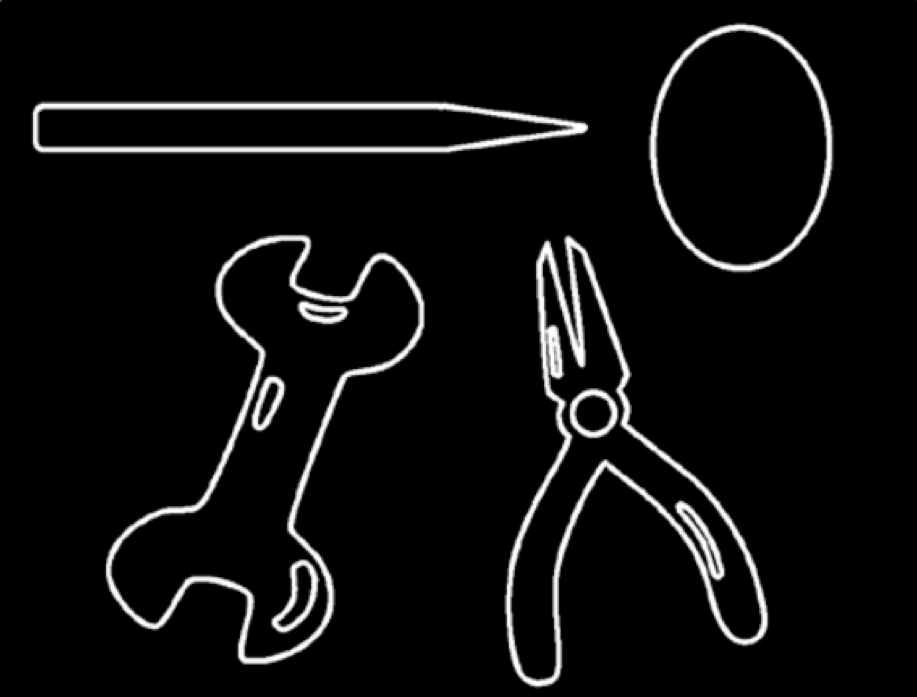
Answer
After performing dilation of A by B, what does the resulting binary image look like?
![]()