Camera Calibration
Computer Vision CMP-6035B
Dr. David Greenwood
Spring 2022
Contents
- Zhang’s Method
- Non-linear Distortion
Zhang’s Method
A method of finding the intrinsic parameters of a camera.
- Zhang, Z., 2000. A flexible new technique for camera calibration. IEEE Transactions on pattern analysis and machine intelligence, 22(11), pp.1330-1334.
Point mapping

Point mapping

Direct Linear Transformation
Compute the 11 intrinsic and extrinsic parameters of a camera.
\[ \textbf{x} = K R [ I_3 | - \textbf{X}_o ] \textbf{X} \]
Zhang’s Method
Compute the 5 intrinsic parameters in \(K\).
\[ \textbf{x} = K R [ I_3 | - \textbf{X}_o ] \textbf{X} \]
Zhang’s Method
Camera calibration using images of a checkerboard.
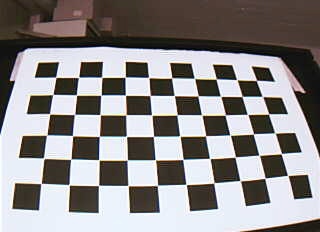
Checkerboard
- Board is of known size and structure.
- The board must be flat.
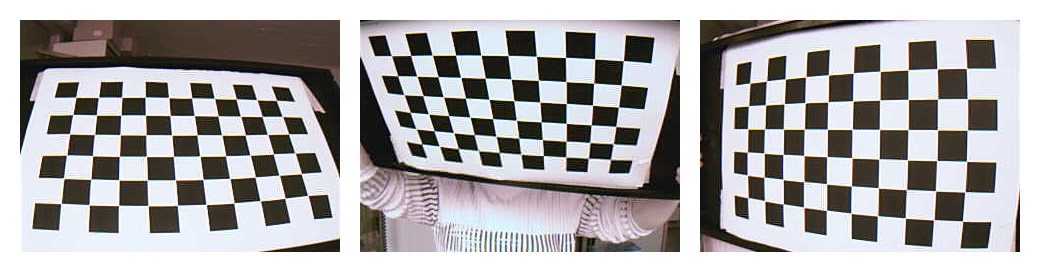
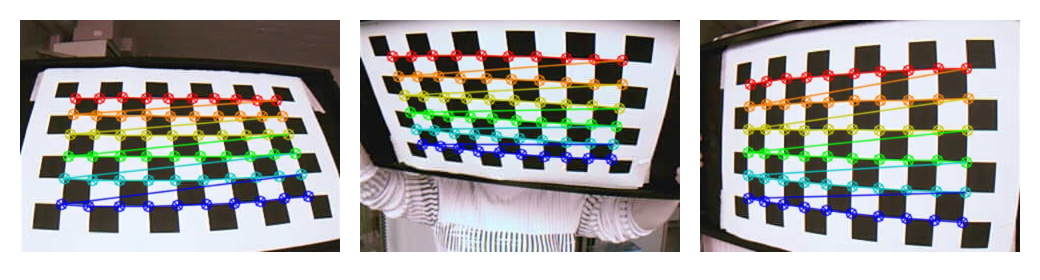
Checkerboard Method
Set the world coordinate system to the corner of the checkerboard.
- do this for each image captured.
- all points lie on x/y plane with z=0
Simplification
The \(Z\) coordinate of each point is zero.
\[ \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} = \begin{bmatrix} c & s & x_H \\ 0 & c(1 + m) & y_H \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} r_{11} & r_{12} & r_{13} & t_1 \\ r_{21} & r_{22} & r_{23} & t_2 \\ r_{31} & r_{32} & r_{33} & t_3 \end{bmatrix} \begin{bmatrix} X \\ Y \\ \color{red}{Z} \\ 1 \end{bmatrix} \]
Simplification
The last column of the rotation matrix has no effect on the system.
- we can delete these components from the system
\[ \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} = \begin{bmatrix} c & s & x_H \\ 0 & c(1 + m) & y_H \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} r_{11} & r_{12} & \color{red}{r_{13}} & t_1 \\ r_{21} & r_{22} & \color{red}{r_{23}} & t_2 \\ r_{31} & r_{32} & \color{red}{r_{33}} & t_3 \end{bmatrix} \begin{bmatrix} X \\ Y \\ \color{red}{Z} \\ 1 \end{bmatrix} \]
Simplification
- The \(Z\) coordinate of each point is zero.
- Deleting the third column of \(R\) gives us:
\[ \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} = \begin{bmatrix} c & s & x_H \\ 0 & c(1 + m) & y_H \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} r_{11} & r_{12} & t_1 \\ r_{21} & r_{22} & t_2 \\ r_{31} & r_{32} & t_3 \end{bmatrix} \begin{bmatrix} X \\ Y \\ 1 \end{bmatrix} \]
Simplification
- Each observed point gives this equation.
- The intrinsics persist for all images.
- The extrinsics persist for each image.
\[ \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} = \begin{bmatrix} c & s & x_H \\ 0 & c(1 + m) & y_H \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} r_{11} & r_{12} & t_1 \\ r_{21} & r_{22} & t_2 \\ r_{31} & r_{32} & t_3 \end{bmatrix} \begin{bmatrix} X \\ Y \\ 1 \end{bmatrix} \]
Setting up the equations
Define a matrix \(H\):
\[ H = \begin{bmatrix} \textbf{h}_1 , \textbf{h}_2 , \textbf{h}_3 \end{bmatrix} = \begin{bmatrix} c & s & x_H \\ 0 & c(1 + m) & y_H \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} r_{11} & r_{12} & t_1 \\ r_{21} & r_{22} & t_2 \\ r_{31} & r_{32} & t_3 \end{bmatrix} \]
One point generates this equation:
\[ \begin{bmatrix} x \\ y \\ 1 \end{bmatrix} = H \begin{bmatrix} X \\ Y \\ 1 \end{bmatrix} \]
Setting up the equations
For multiple point observations:
\[ \begin{bmatrix} x_i \\ y_i \\ 1 \end{bmatrix} = \underset{3 \times 3}{H} \begin{bmatrix} X_i \\ Y_i \\ 1 \end{bmatrix}, \quad i = 1 ..., n \]
Analogous to the DLT.
Parameter Estimation
We estimate a \(3 \times 3\) homography instead of \(3 \times 4\) projection.
\[ a_{x_i}^T \textbf{h} = 0, \quad a_{y_i}^T \textbf{h} = 0 \]
with:
\[ \begin{aligned} \textbf{h} &= vec(H^T) \\ a_{x_i}^T &= (-X_i, -Y_i, -1, 0, 0, 0, x_i X_i, x_i Y_i, x_i) \\ a_{y_i}^T &= (0, 0, 0, -X_i, -Y_i, -1, y_i X_i, y_i Y_i, y_i) \end{aligned} \]
Parameter Estimation
Solving the system of linear equations leads to an estimate of the parameters of \(H\).
- We need to identify at least 4 points.
- \(H\) has 8 Dof (degrees of freedom)
- each point provides 2 observations
We now have the parameters of \(H\), how do we find \(K\)?
Decompose Intrinsic Parameters
For the DLT, we could use QR decomposition to find the rotation matrix of the extrinsic parameters.
- We can not do this for Zhang’s method.
- We eliminated part of \(R\) earlier.
Decompose Intrinsic Parameters
\[ H = \begin{bmatrix} \textbf{h}_1 , \textbf{h}_2 , \textbf{h}_3 \end{bmatrix} = \underbrace {\begin{bmatrix} c & s & x_H \\ 0 & c(1 + m) & y_H \\ 0 & 0 & 1 \end{bmatrix}}_{K} \underbrace {\begin{bmatrix} r_{11} & r_{12} & t_1 \\ r_{21} & r_{22} & t_2 \\ r_{31} & r_{32} & t_3 \end{bmatrix}}_{[\textbf{r}_1, \textbf{r}_2, \textbf{t}]} \]
Decompose Intrinsic Parameters
We need to extract \(K\) from the matrix \(H = K[\textbf{r}_1, \textbf{r}_2, \textbf{t}]\) we computed using SVD.
Decompose Intrinsic Parameters
We need to extract \(K\) from the matrix \(H = K[\textbf{r}_1, \textbf{r}_2, \textbf{t}]\) we computed using SVD.
Four step process:
- Exploit constraints of \(K, \textbf{r}_1, \textbf{r}_2\)
- Define a matrix \(B = K^{-T}K^{-1}\)
- Solve \(B\) using another homogeneous linear system.
- Decompose \(B\).
Exploiting Constraints
What constraints do we have?
Exploiting Constraints
\[ K = \begin{bmatrix} c & s & x_H \\ 0 & c(1 + m) & y_H \\ 0 & 0 & 1 \end{bmatrix} \]
\(K\) is invertible.
Exploiting Constraints
\[ H = \begin{bmatrix} \textbf{h}_1 , \textbf{h}_2 , \textbf{h}_3 \end{bmatrix} = \underbrace {\begin{bmatrix} c & s & x_H \\ 0 & c(1 + m) & y_H \\ 0 & 0 & 1 \end{bmatrix}}_{K} \underbrace {\begin{bmatrix} r_{11} & r_{12} & t_1 \\ r_{21} & r_{22} & t_2 \\ r_{31} & r_{32} & t_3 \end{bmatrix}}_{[\textbf{r}_1, \textbf{r}_2, \textbf{t}]} \]
\[ [\textbf{r}_1, \textbf{r}_2, \textbf{t}] = K^{-1} [\textbf{h}_1 , \textbf{h}_2 , \textbf{h}_3] \]
\[ \Rightarrow \textbf{r}_1 = K^{-1} \textbf{h}_1, \quad \textbf{r}_2 = K^{-1} \textbf{h}_2 \]
Exploiting Constraints
As \([\textbf{r}_1 , \textbf{r}_2 , \textbf{r}_3]\) are the columns of a rotation matrix, they form an orthonormal basis.
\[ \textbf{r}_1^T \textbf{r}_2 = 0, \quad ||\textbf{r}_1|| = ||\textbf{r}_2|| = 1 \]
Exploiting Constraints
\[ \textbf{r}_1 = K^{-1} \textbf{h}_1, \quad \textbf{r}_2 = K^{-1} \textbf{h}_2, \quad \textbf{r}_1^T \textbf{r}_2 = 0, \quad ||\textbf{r}_1|| = ||\textbf{r}_2|| = 1 \]
\[ \textbf{h}_1^T K^{-T} K^{-1} \textbf{h}_2 = 0 \]
\[ \begin{aligned} \textbf{h}_1^T K^{-T} K^{-1} \textbf{h}_1 = \textbf{h}_2^T K^{-T} K^{-1} \textbf{h}_2 \\[10pt] \textbf{h}_1^T K^{-T} K^{-1} \textbf{h}_1 - \textbf{h}_2^T K^{-T} K^{-1} \textbf{h}_2 = 0 \end{aligned} \]
Exploiting Constraints
\[ \textbf{h}_1^T K^{-T} K^{-1} \textbf{h}_2 = 0 \]
\[ \textbf{h}_1^T K^{-T} K^{-1} \textbf{h}_1 - \textbf{h}_2^T K^{-T} K^{-1} \textbf{h}_2 = 0 \]
Exploiting Constraints
Define a matrix \(B := K^{-T}K^{-1}\)
\[ \textbf{h}_1^T B \textbf{h}_2 = 0 \]
\[ \textbf{h}_1^T B \textbf{h}_1 - \textbf{h}_2^T B \textbf{h}_2 = 0 \]
Exploiting Constraints
From \(B\) the calibration matrix can be recovered using Cholesky decomposition.
\[ B = \begin{bmatrix} b_{11} & b_{12} & b_{13} \\ b_{21} & b_{22} & b_{23} \\ b_{31} & b_{32} & b_{33} \end{bmatrix} \]
\[ chol(B) = AA^T \Rightarrow A = K^{-T} \]
If we know \(B\), we can recover the calibration matrix \(K\).
Exploiting Constraints
What do we have so far?
\[ \textbf{h}_1^T B \textbf{h}_2 = 0 \]
\[ \textbf{h}_1^T B \textbf{h}_1 - \textbf{h}_2^T B \textbf{h}_2 = 0 \]
- Matrix \(B\), which is symmetric positive, so 6 unknowns.
- \(\textbf{h}\) are known.
- Two equations that relate \(B\) and \(\textbf{h}\).
Exploiting Constraints
Define a vector \(\textbf{b} = (b_{11}, b_{12}, b_{13}, b_{22}, b_{23}, b_{33})\)
\[ B = \begin{bmatrix} \color{red}{b_{11}} & \color{red}{b_{12}} & \color{red}{b_{13}} \\ b_{12} & \color{red}{b_{22}} & \color{red}{b_{23}} \\ b_{13} & b_{23} & \color{red}{b_{33}} \end{bmatrix} \]
There are 6 unknowns in \(B\), because it is symmetric.
Exploiting Constraints
Construct a system of equations \(V\textbf{b}=0\) exploiting our constraints.
\[ v^{T}_{12}\textbf{b} = 0, \quad v^{T}_{11}\textbf{b} - v^{T}_{22}\textbf{b} = 0 \]
Matrix \(V\)
The matrix \(V\) is given by:
\[ V = \begin{bmatrix} v^{T}_{12} \\ v^{T}_{11} - v^{T}_{22} \end{bmatrix}, \quad with \quad v_{ij} = \begin{bmatrix} h_{1i}h_{1j} \\ h_{1i}h_{2j}+h_{2i}h_{1j} \\ h_{3i}h_{1j}+h_{1i}h_{3j} \\ h_{2i}h_{2j} \\ h_{3i}h_{2j}+h_{2i}h_{3j} \\ h_{3i}h_{3j} \end{bmatrix} \]
Matrix \(V\)
For each image we get:
\[ \begin{bmatrix} v^{T}_{12} \\ v^{T}_{11} - v^{T}_{22} \end{bmatrix} \textbf{b} = 0 \]
Matrix \(V\)
For multiple images we stack the matrices to a \(2n \times 6\) matrix:
\[ \begin{bmatrix} v^{T}_{12} \\ v^{T}_{11} - v^{T}_{22} \\ \dots \\ v^{T}_{12} \\ v^{T}_{11} - v^{T}_{22} \end{bmatrix} \textbf{b} = 0 \]
We need to solve the linear system of \(V\textbf{b}=0\) to find \(b\) and hence \(K\).
Solving the Linear System
The system \(V\textbf{b}=0\) has a trivial solution when \(\textbf{b}=0\) which will not provide a valid matrix \(B\).
- Apply additional constraint \(||\textbf{b}|| = 1\) .
Solving the Linear System
Real world measurements are noisy.
- Find the solution that minimises the least squares error:
\[ b^* = arg\underset{b}{min}||V \textbf{b}|| \quad \text{with} \quad ||\textbf{b}|| = 1 \]
Use SVD and choose the singular vector corresponding to the smallest singular value.
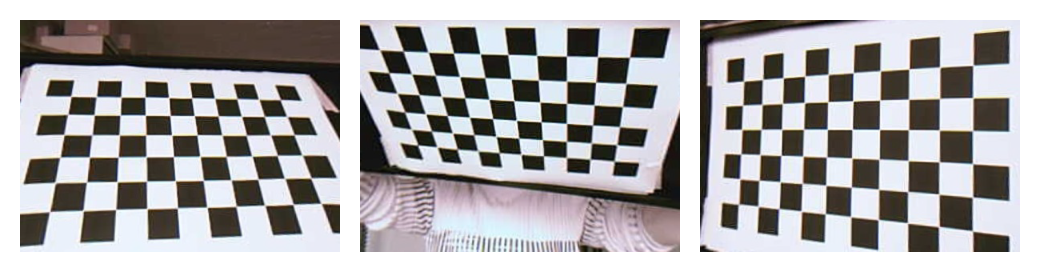
Minimum Requirements
- At least 4 points in each target image.
- Each target image gives two equations.
- \(B\) has 6 DoF so we need 3 different views of the target.
- Solve \(V\textbf{b}=0\) using SVD to compute \(K\).
Non-Linear Distortion
How to deal with non-linear distortion?
Non-Linear Distortion
A general calibration matrix is obtained by multiplying the affine camera with a general mapping.
\[ {}^{a}H(\textbf{x}, q)K = \begin{bmatrix} 1 & 0 & x \Delta(\textbf{x}, q) \\ 0 & 1 & y \Delta(\textbf{x}, q) \\ 0 & 0 & 1 \end{bmatrix} \]
Lens Distortion

Radial Distortion
A standard approach for radial distortion:
\[ \begin{aligned} {}^{a}x &= x(1 + q_1r^2 + q_2r^4) \\ {}^{a}y &= y(1 + q_1r^2 + q_2r^4) \end{aligned} \]
- with \([x, y]^{T}\) a point projected by the ideal camera.
- with \(r\) the distance from the camera principal point to the pixel.
- \(q_1\) and \(q_2\) are the radial distortion parameters.
Lens Distortion
Lens distortion can be calculated by minimising a non-linear function.
- Make an initial guess for the distortion parameters.
- Calculate \(K\) using Zhang’s method.
- Measure the reprojection error.
- Refine the distortion parameters.
Packages
These, and many other methods for calibration, are available in popular image processing packages.
- OpenCV for python and C++.
- Camera Calibration Toolkit for Matlab.
Summary
- Pinhole camera model.
- Non-linear model for distortion.
- Calibration using images of a target.
Reading:
- Forsyth, Ponce; Computer Vision: A modern approach.
- Hartley, Zisserman; Multiple View Geometry in Computer Vision
- Zhang, Z., A flexible new technique for camera calibration.